7.3.1 Overview
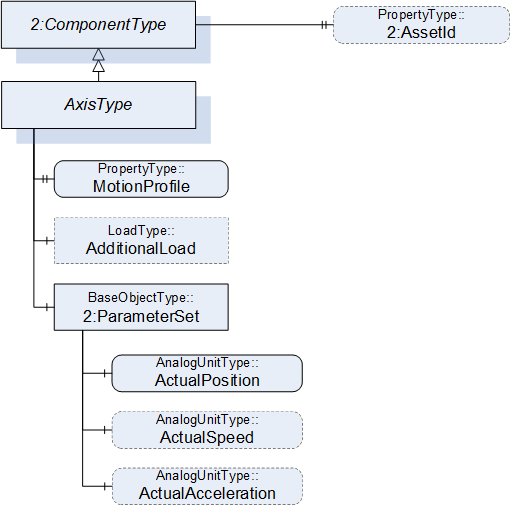
The AxisType describes an axis of a motion device. It is formally defined in Table 15.
 OPC UA for Robotics – Part 1: Vertical Integration
OPC UA for Robotics – Part 1: Vertical Integration
The AxisType describes an axis of a motion device. It is formally defined in Table 15.