OPC UA for Robotics – Part 1: Vertical Integration
7.15.1 Overview
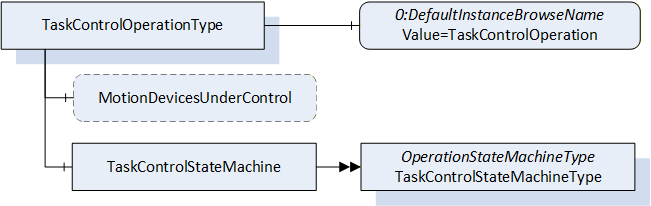
Figure 24 – TaskControlOperationType Overview
Table 63 – TaskControlOperationType Definition
Attribute
Value
BrowseName
TaskControlOperationType
IsAbstract
False
References
Node Class
BrowseName
DataType
TypeDefinition
Other
Subtype of the BaseObjectType defined in OPC 10000-5.
0:HasProperty
Variable
MotionDevicesUnderControl
0:NodeId[]
0:PropertyType
O, RO
0:HasComponent
Object
TaskControlStateMachine
TaskControlStateMachineType
M
0:HasProperty
Variable
0:DefaultInstanceBrowseName
0:QualifiedName
0:PropertyType
ConformanceUnits
Rob Task Control Monitor
Rob Task Control Operation
Rob TC MD Relationship
The optional Variable MotionDevicesUnderControl provides an array of NodeIds pointing to instances of MotionDeviceType described in 7.2, which are under control of this task control, in combination with the loaded program.
The Object TaskControlStateMachine provides a state machine to monitor or to control the task controls which instantiated the TaskControlOperationType.
The Property 0:DefaultInstanceBrowseName of the TaskControlOperationType has an additional Attribute defined in Table 64.
Table 64 – TaskControlOperationType Attribute values for child Nodes