13.10 Representations of exemplary server implementations
This chapter describes different examples for the usage of DriveType or a SubType of ComponentType defined in OPC 10000-100 inclusive the references described in this specification.
All views show only the instances and references necessary to better illustrate the examples described.
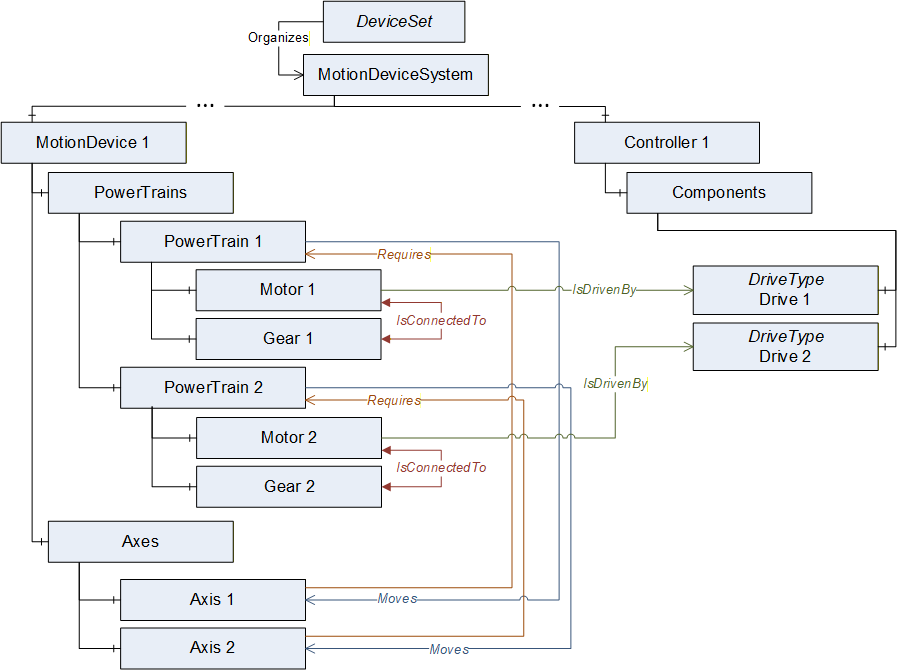
13.10.1 ObjectTypes and references used with DriveType instances
Figure B.15 describes the usage of DriveType as an instance of a single-slot drive regarding the manipulator showed Figure B.10 on the left side.
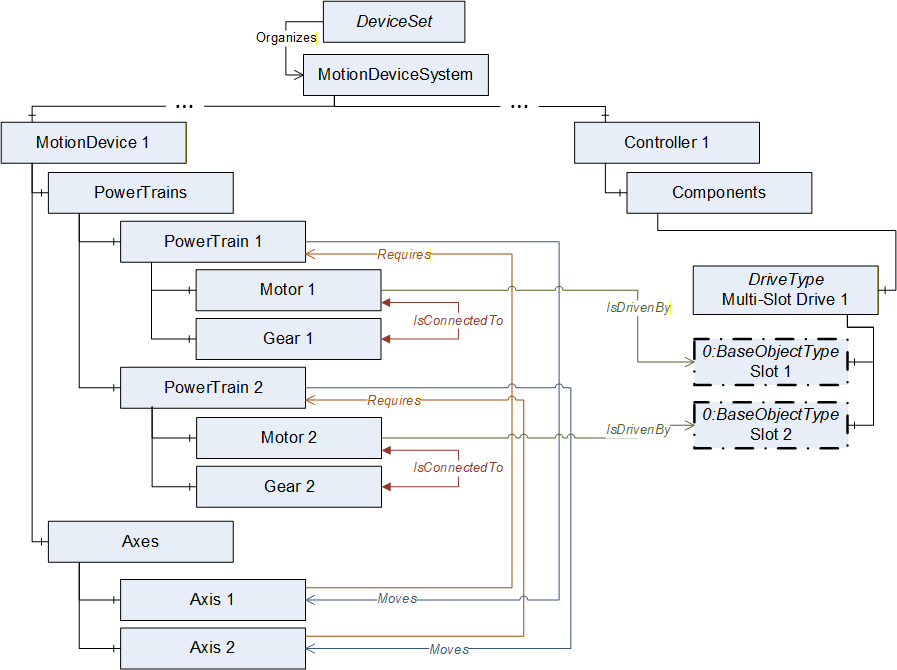
13.10.2 ObjectTypes and references used with instances of vendor specific subtypes of BaseObjectType for drive-channels
Figure B.16 describes the usage of slots or channels of a multi-slot-drive. The instance of the slot is a vendor specific subtype of BaseObjectType.
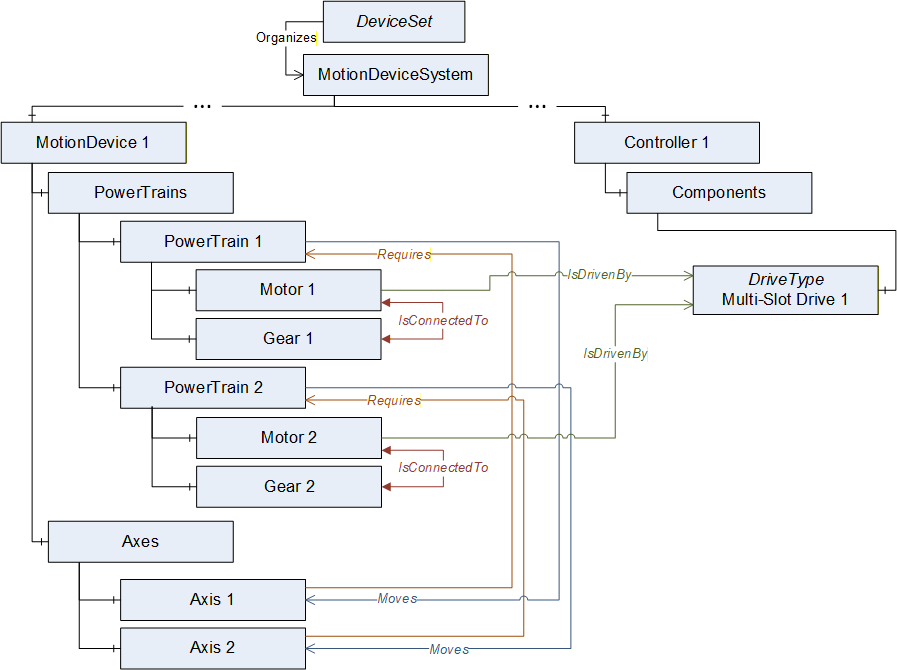
13.10.3 ObjectTypes and references used with instances DriveType for drives with drive-channels
Figure B.17 describes the usage of DriveType for a multi-slot-drive if deeper information of slot definition is not available.
It is allowed that several instances of MotorType reference IsDrivenBy to one multi-slot-drive.
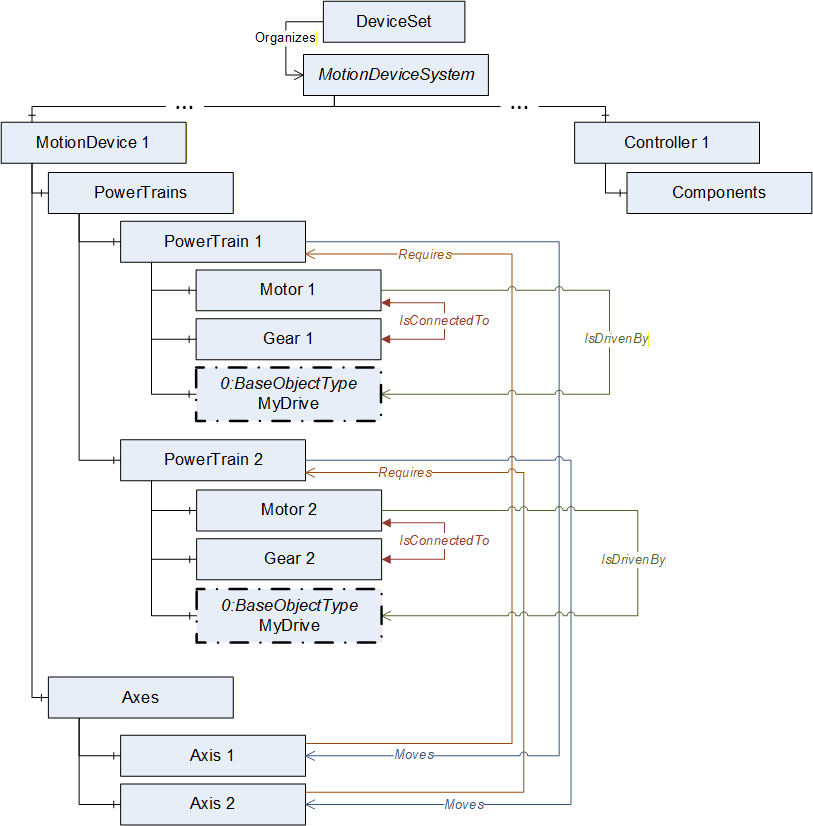
13.10.4 ObjectTypes and references used with instances of vendor specific subtypes of BaseObjectType for motor-integrated-drives
Figure B.18 describes the usage with a motor-integrated-drive as one physical device. The instance MyDrive is a vendor specific subtype of BaseObjectType. Identification properties of this physical device shall be defined within the referenced MotorType.
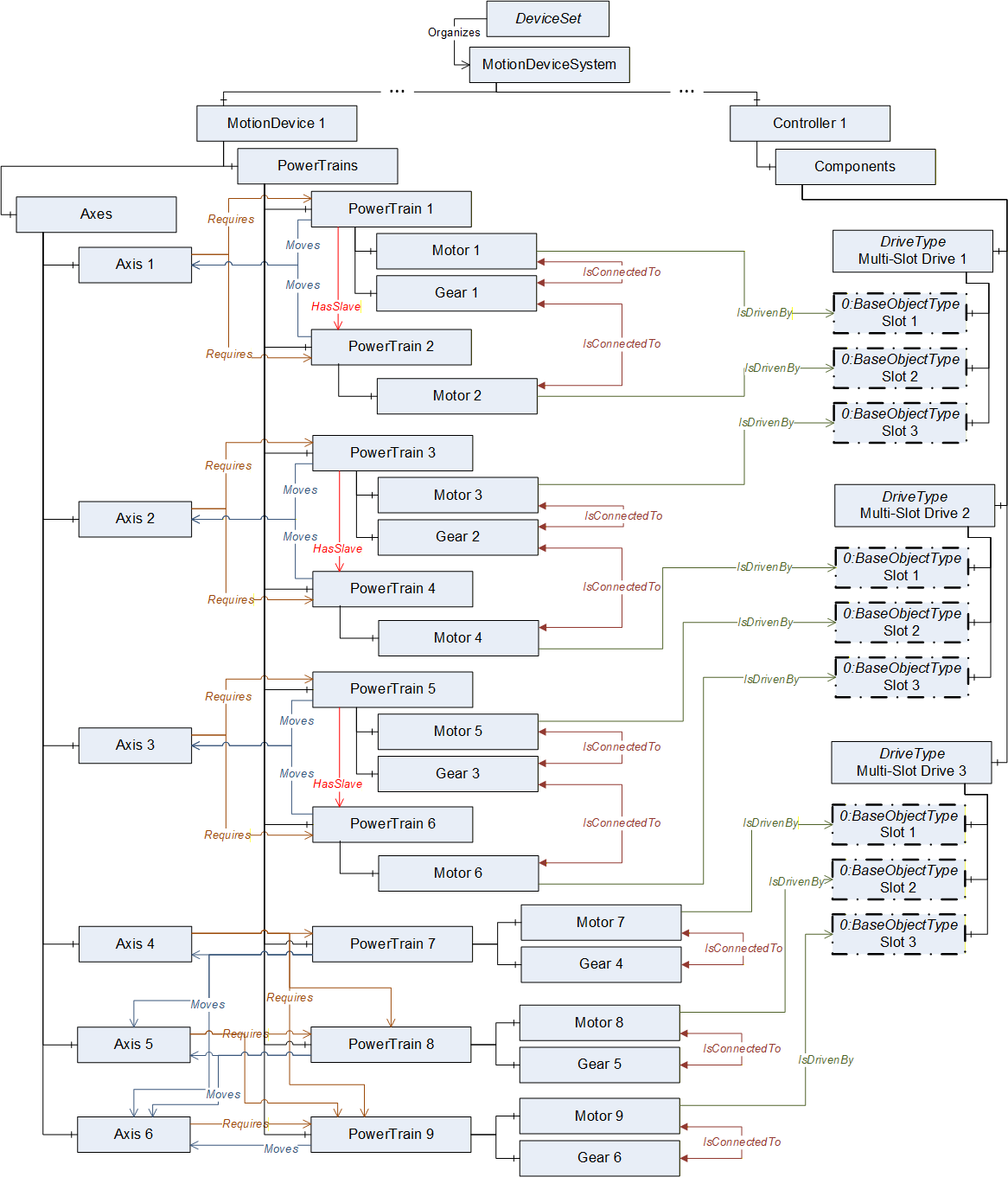
13.10.5 Abstract example of a six-axis robot with master-slave axis and drive-slots
Figure B.19 describes an example view on a server with the instances of ObjectTypes and references of a six-axis robot with master-slave axis and drive-slots described in Annex B.9.2.
If a leader-follower configuration only has one gear this shall be placed inside the leader-powertrain.
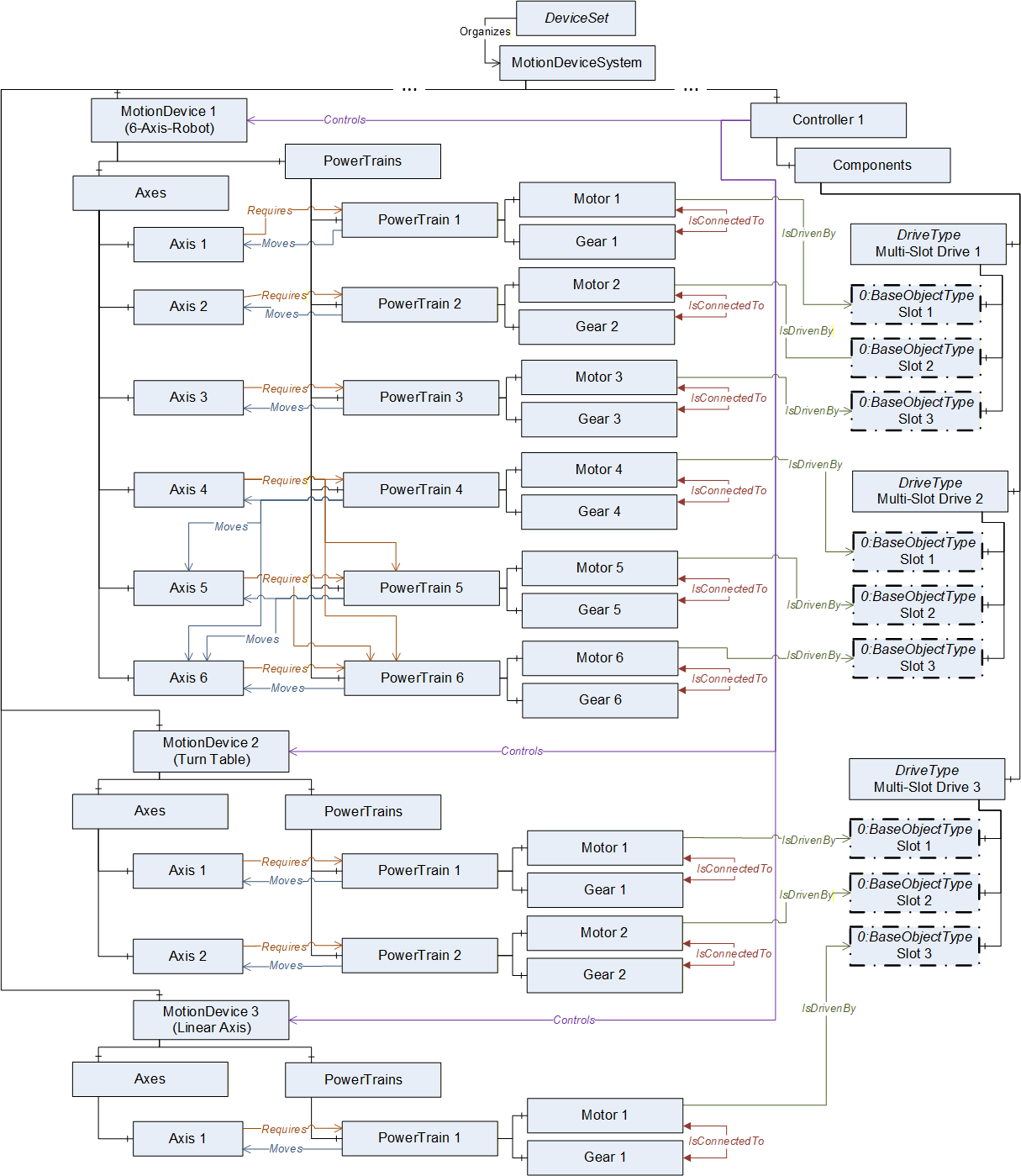
13.10.6 Abstract example of a motion device system with three motion devices
Figure B.20 describes an example view on a server with the instances of ObjectTypes and references of a motion device system consisting of a six-axis robot, a linear unit and a turntable which are controlled by one controller.