13.4 Examples for motion devices
A motion device can be any manipulator e.g. a robot, a linear unit, or a turn table. For each motion device which has an own type plate an instance of a MotionDeviceType shall be created.
The kind of motion device shall be described with the Property MotionDeviceCategory of the ParameterSet of the MotionDeviceType by the MotionDeviceCategoryEnumeration, which is based on definitions of ISO 8373:2012.
The Figures Figure B.1 and Figure B.2 show examples of cartesian manipulators.
Figure B.2 shows a portal manipulator, a variant of a cartesian manipulator. Axis 1 in this example is driven with master-slave and a robot-hand is mounted at the flange of the cartesian manipulator.
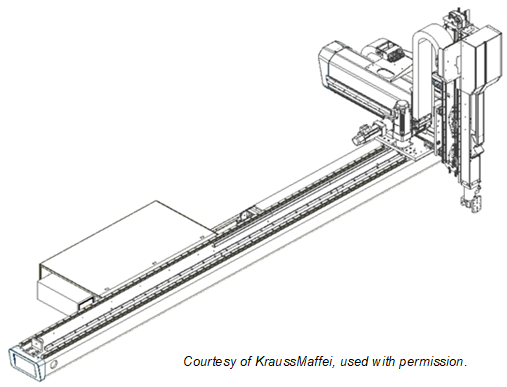
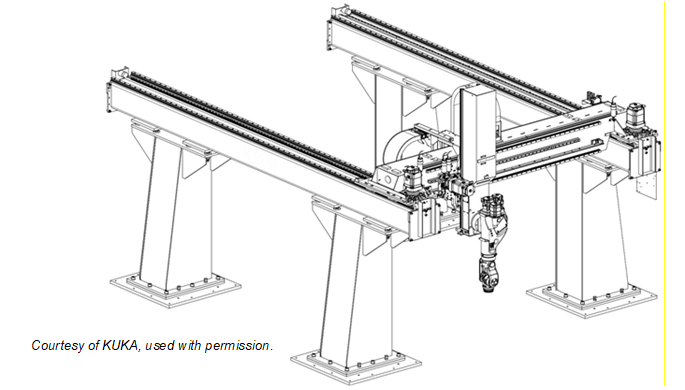
Figure B.3 shows an example of a parallel manipulator. So called delta robots, as shown in Figure B.4, are also parallel manipulators.
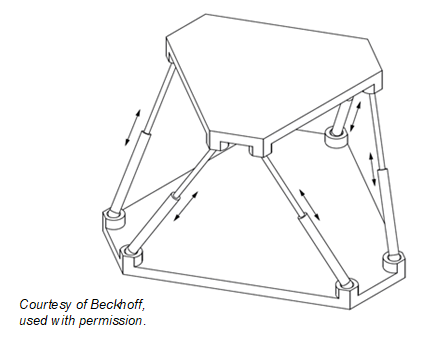
Figure B.4 shows an abstract example of a delta robot.
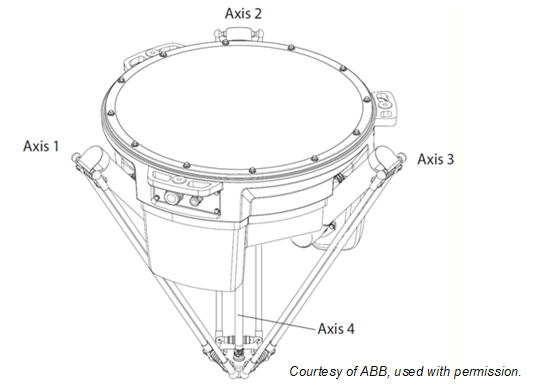
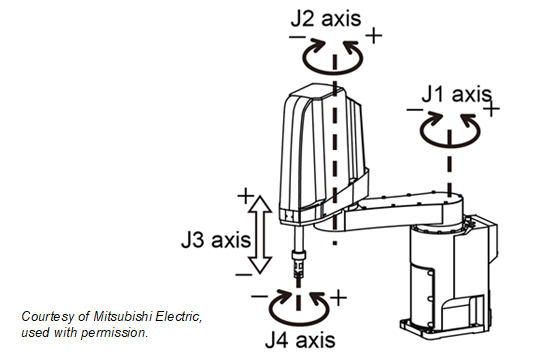
Figure B.5 shows an abstract example of a SCARA robot.
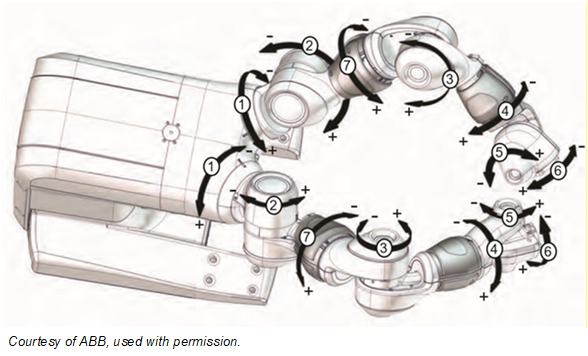
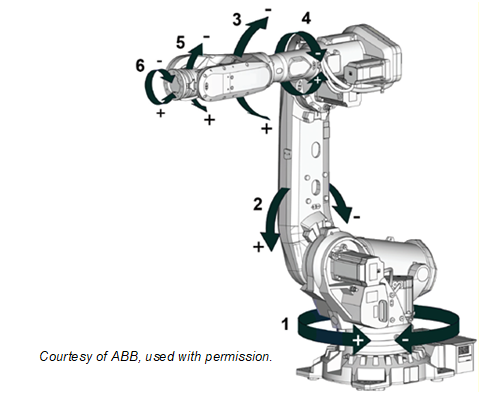
A typical example of an articulated robot is shown in Figure B.6.
Another example of an articulated robot is a so-called humanoid robot as Figure B.7 schematically shows.