
13.9.2 Example articulated six-axis industrial robot with 3 leader-follower axes
A high-payload six-axis industrial robot shown in Figure B.6 can have nine power trains for the movement of the six axes. In this example the axes 1 to 3 are each driven by two power trains with leader-follower configuration.
Figure B.12 shows the use of the HasSlave reference in addition to the power train to axis references.
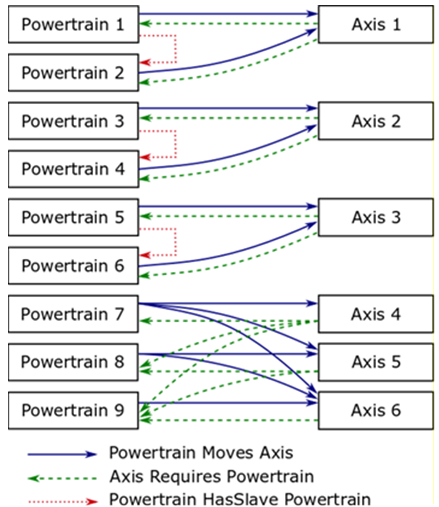
A power train HasSlave a power train means that one power train is the master of a leader-follower-configuration and he references HasSlave to power train which is slave coupled.
HasSlave References:
Power train 1 HasSlave power train 2
Power train 3 HasSlave power train 4
Power train 5 HasSlave power train 6
For this leader-follower configuration the Moves and Requires references :
Power train 1 Moves axis 1
Power train 2 Moves axis 1
Power train 3 Moves axis 2
Power train 4 Moves axis 2
Power train 5 Moves axis 3
Power train 6 Moves axis 3
Power train 7 Moves axis 4, axis 5 and axis 6
Power train 8 Moves axis 5 and axis 6
Power train 9 Moves axis 6
Axis 1 Requires power train 1 and power train 2
Axis 2 Requires power train 3 and power train 4
Axis 3 Requires power train 5 and power train 6
Axis 4 Requires power train 7, power train 8 and power train 9
Axis 5 Requires power train 8 and power train 9
Axis 6 Requires power train 9