
3 Terms, definitions, and conventions
For the purposes of this document, the following terms and definitions apply.
3.1 Overview
It is assumed that the reader of this document understands the basic concepts of OPC UA information modelling and the referenced documents. This specification will use these concepts to describe the Robotics Information Model.
Note that OPC UA terms and terms defined in this specification are written in italics in the specification.
3.2 Terms
| Term | Definition of Term |
| Asset management | The management of the maintenance of physical assets of an organization throughout each asset's lifecycle. |
| Automatic mode | Operational mode in which the robot control system operates in accordance with the task programme (ISO 10218). |
| Axis | The mechanical joint (ISO 8373). Joint is used as a synonym for axis. |
| Condition monitoring | Acquisition and processing of information and data that indicate the state of a machine over time (ISO 13372:2012). |
| Controller | Controlling unit of one or more motion devices. A controller can be e.g. a specific control cabinet or a PLC. |
| Industrial robot | Automatically controlled, reprogrammable multipurpose manipulator, programmable in three or more axes, which can be either fixed in place or mobile for use in industrial automation applications (ISO 10218). |
| Industrial Robot System | system comprising industrial robot, end effectors and any machinery, equipment, devices, external auxiliary axes or sensors supporting the robot performing its task (ISO 8373) |
| Joint | See Axis definition. |
| Manipulator | Machine in which the mechanism usually consists of a series of segments, jointed or sliding relative to one another, for the purpose of grasping and/or moving objects (pieces or tools) usually in several degrees of freedom (ISO 8373) |
| Manual mode | Control state that allows for the direct control by an operator (ISO 10218). |
| Motion device | A motion device has as least one axis and is a multifunctional manipulator designed to move material, parts, tools, or specialized devices through variable programmed motions for the performance of a variety of tasks. Examples are an industrial robot, positioner, or mobile platform. |
| Motion device system | The entire system in which one or more motion devices and one or more controllers are integrated, e.g. a robot system. |
| Operating mode | State of the robot control system (ISO 8373), i.e. Controller |
| Operational mode | ISO 10218-1:2011 Ch.5.7 Operational Modes |
| Operator | Person designated to start, monitor, and stop the intended operation of a robot or robot system (ISO 8373). |
| Teach pendant | Hand-held unit linked to the control system with which a robot can be programmed or moved (ISO 8373). |
| Power train | The composition of switch gears, fuses, transformers, converters, drives, motors, encoders and gears to convert power to motion of one or more axis. |
| Predictive maintenance | Maintenance performed as governed by condition monitoring programmes (ISO 13372:2012) |
| Preventive maintenance | Maintenance performed according to a fixed schedule, or according to a prescribed criterion, that detects or prevents degradation of a functional structure, system or component, in order to sustain or extend its useful life. |
| Protective stop | Type of interruption of operation that allows a cessation of motion for safeguarding purposes, and which retains the programme logic to facilitate a restart (ISO 10218). |
| Safe state | A defined state of the robot which is free of hazards |
| Safety function | A safety rated function which will signal the controller to bring motion devices to a safe state, e.g. emergency stop, protective stop |
| Safety states | Set of safety functions and states which are related to a motion device system. |
| Software | Runtime software or firmware of the controller. In ISO 8373, this is called control program, and is defined like this: Inherent set of control instructions which defines the capabilities, actions and responses of a robot or robot system NOTE This type of program is usually generated before installation and can only be modified thereafter by the manufacturer. |
| Task control | Execution engine that loads and runs task programs. Synonyms for a task control are a sequence control or a flow control. |
| Task module | A module is a self-contained unit of code that can be reused across different parts of a program or in different programs. |
| Task program | Program running on the task control. From ISO 8373: Set of instructions for motion and auxiliary functions that define the specific intended task of the robot or robot system NOTE 1 This type of program is usually generated after the installation of the robot and can be modified by a trained person under defined conditions. NOTE 2 An application is a general area of work; a task is specific within the application. |
| Tool center point | Point defined for a given application with regards to the mechanical interface coordinate system (ISO 8373) |
| User level | Current assigned user role. |
| User roles | User roles consist of specific permissions to access features within a software. Users can be assigned to roles. |
| Virtual axis | Virtual axis has no power trains directly assigned. |
Annex B contains examples of the described terms.
3.3 Abbreviations
| Abbreviation | Definition of Abbreviation |
| CPU | Central Processing Unit |
| DOF | Degrees of freedom |
| ERP | Enterprise Resource Planning |
| HMI | Human Machine Interface |
| HTTP | Hypertext Transfer Protocol |
| MES | Manufacturing Execution System |
| OPC | Open Platform Communications |
| OPC UA | OPC Unified Architecture |
| OPC 10000-100 | OPC Unified Architecture for Devices (DI) OPC Unified Architecture - Part 100 - Devices |
| PLC | Programmable logic controller |
| PMS | Preventive Maintenance System |
| TCP | Tool center point |
| TCP/IP | Transmission Control Protocol/Internet Protocol |
| TCS | Tool Coordinate System |
| UPS | Uninterruptible Power Supply |
| URI | A uniform resource identifier (URI) is a string of characters used to identify names or resources on the Internet. The URI describes the mechanism used to access resources, the computers on which resources are housed and the names of the resources on each computer. |
| URL | Uniform resource locator |
| VDMA | The Mechanical Engineering Industry Association (VDMA) represents more than 3,200 member companies in the SME-dominated mechanical and systems engineering industry in Germany and Europe. |
3.4 Conventions used in this document
3.4.1 Conventions for Node descriptions
Node definitions are specified using tables (see Table 4).
Attributes are defined by providing the Attribute name and a value, or a description of the value.
References are defined by providing the ReferenceType name, the BrowseName of the TargetNode and its NodeClass.
If the TargetNode is a component of the Node being defined in the table, the Attributes of the composed Node are defined in the same row of the table.
The DataType is only specified for Variables; "[<number>]" indicates a single-dimensional array, for multi-dimensional arrays the expression is repeated for each dimension (e.g. [2][3] for a two-dimensional array). For all arrays, the ArrayDimensions is set as identified by <number> values. If no <number> is set, the corresponding dimension is set to 0, indicating an unknown size. If no number is provided at all the ArrayDimensions can be omitted. If no brackets are provided, it identifies a scalar DataType and the ValueRank is set to the corresponding value (see OPC 10000-3). In addition, ArrayDimensions is set to null or is omitted. If it can be Any or ScalarOrOneDimension, the value is put into "{<value>}", so either "{Any}" or "{ScalarOrOneDimension}" and the ValueRank is set to the corresponding value (see OPC 10000-3) and the ArrayDimensions is set to null or is omitted. Examples are given Table 3.
| Notation | DataType | ValueRank | ArrayDimensions | Description |
| Int32 | Int32 | -1 | omitted or null | A scalar Int32. |
| Int32[] | Int32 | 1 | omitted or {0} | Single-dimensional array of Int32 with an unknown size. |
| Int32[][] | Int32 | 2 | omitted or {0,0} | Two-dimensional array of Int32 with unknown sizes for both dimensions. |
| Int32[3][] | Int32 | 2 | {3,0} | Two-dimensional array of Int32 with a size of 3 for the first dimension and an unknown size for the second dimension. |
| Int32[5][3] | Int32 | 2 | {5,3} | Two-dimensional array of Int32 with a size of 5 for the first dimension and a size of 3 for the second dimension. |
| Int32{Any} | Int32 | -2 | omitted or null | An Int32 where it is unknown if it is scalar or array with any number of dimensions. |
| Int32{ScalarOrOneDimension} | Int32 | -3 | omitted or null | An Int32 where it is either a single-dimensional array or a scalar. |
The TypeDefinition is specified for Objects and Variables.
The TypeDefinition column specifies a symbolic name for a NodeId, i.e. the specified Node points with a HasTypeDefinition Reference to the corresponding Node.
The ModellingRule of the referenced component is provided by specifying the symbolic name of the rule in the ModellingRule column. In the AddressSpace, the Node shall use a HasModellingRule Reference to point to the corresponding ModellingRule Object.
If the NodeId of a DataType is provided, the symbolic name of the Node representing the DataType shall be used.
Nodes of all other NodeClasses cannot be defined in the same table; therefore, only the used ReferenceType, their NodeClass and their BrowseName are specified. A reference to another part of this document points to their definition.
Table 4 illustrates the table. If no components are provided, the DataType, TypeDefinition and ModellingRule columns may be omitted and only a Comment column is introduced to point to the Node definition.
| Attribute | Value | ||||
| Attribute name | Attribute value. If it is an optional Attribute that is not set "-" will be used. | ||||
| References | NodeClass | BrowseName | DataType | TypeDefinition | ModellingRule |
|---|---|---|---|---|---|
| ReferenceType name | NodeClass of the TargetNode. | BrowseName of the target Node. If the Reference is to be instantiated by the server, then the value of the target Node's BrowseName is "-". | DataType of the referenced Node, only applicable for Variables. | TypeDefinition of the referenced Node, only applicable for Variables and Objects. | Referenced ModellingRule of the referenced Object. |
| NOTE Notes referencing footnotes of the table content. | |||||
Components of Nodes can be complex that is containing components by themselves. The TypeDefinition, NodeClass, DataType and ModellingRule can be derived from the type definitions, and the symbolic name can be created as defined in chapter 3.4.3.1. Therefore, those containing components are not explicitly specified; they are implicitly specified by the type definitions.
3.4.2 NodeIds and BrowseNames
3.4.2.1 NodeIds
The NodeIds of all Nodes described in this standard are only symbolic names. Annex A defines the actual NodeIds.
The symbolic name of each Node defined in this specification is its BrowseName, or, when it is part of another Node, the BrowseName of the other Node, a ".", and the BrowseName of itself. In this case "part of" means that the whole has a HasProperty or HasComponent Reference to its part. Since all Nodes not being part of another Node have a unique name in this specification, the symbolic name is unique.
The namespace for all NodeIds defined in this specification is defined in Annex A. The namespace for this NamespaceIndex is Server-specific and depends on the position of the namespace URI in the server namespace table.
Note that this specification not only defines concrete Nodes, but also requires that some Nodes shall be generated, for example one for each Session running on the Server. The NodeIds of those Nodes are Server-specific, including the namespace. But the NamespaceIndex of those Nodes cannot be the NamespaceIndex used for the Nodes defined in this specification, because they are not defined by this specification but generated by the Server.
3.4.2.2 BrowseNames
The text part of the BrowseNames for all Nodes defined in this specification is specified in the tables defining the Nodes. The NamespaceIndex for all BrowseNames defined in this specification is defined in Annex A.
If the BrowseName is not defined by this specification, a namespace index prefix like '0:EngineeringUnits' or '2:DeviceRevision' is added to the BrowseName. This is typically necessary if a property of another specification is overwritten or used in the OPC UA types defined in this specification. Table 130 provides a list of namespaces and their indexes as used in this specification.
3.4.3 Common Attributes
3.4.3.1 General
The Attributes of Nodes, their DataTypes and descriptions are defined in OPC 10000-3. Attributes not marked as optional are mandatory and shall be provided by a Server. The following tables define if the Attribute value is defined by this specification or if it is server specific.
For all Nodes specified in this specification, the Attributes named in Figure 5 shall be set as specified in the table.
| Attribute | Value |
| DisplayName | The DisplayName is a LocalizedText. Each server shall provide the DisplayName identical to the BrowseName of the Node for the LocaleId "en". Whether the server provides translated names for other LocaleIds is server specific. |
| Description | Optionally a server-specific description is provided. |
| NodeClass | Shall reflect the NodeClass of the Node. |
| NodeId | The NodeId is described by BrowseNames as defined in 3.4.2.1. |
| WriteMask | Optionally the WriteMask Attribute can be provided. If the WriteMask Attribute is provided, it shall set all non-server-specific Attributes to not writable. For example, the Description Attribute may be set to writable since a Server may provide a server-specific description for the Node. The NodeId shall not be writable, because it is defined for each Node in this specification. |
| UserWriteMask | Optionally the UserWriteMask Attribute can be provided. The same rules as for the WriteMask Attribute apply. |
| RolePermissions | Optionally server-specific role permissions can be provided. |
| UserRolePermissions | Optionally the role permissions of the current Session can be provided. The value is server-specific and depend on the RolePermissions Attribute (if provided) and the current Session. |
| AccessRestrictions | Optionally server-specific access restrictions can be provided. |
3.4.3.2 Objects
For all Objects specified in this specification, the Attributes named in Table 6 shall be set as specified in the table. The definitions for the Attributes can be found in OPC 10000-3.
| Attribute | Value |
| EventNotifier | Whether the Node can be used to subscribe to Events or not is server specific. |
3.4.3.3 Variables
For all Variables specified in this specification, the Attributes named in Table 7 shall be set as specified in the table. The definitions for the Attributes can be found in OPC 10000-3.
| Attribute | Value |
| MinimumSamplingInterval | Optionally, a server-specific minimum sampling interval is provided. |
| AccessLevel | The access level for Variables used for type definitions is server-specific, for all other Variables defined in this specification, the access level shall allow reading; other settings are server-specific. |
| UserAccessLevel | The value for the UserAccessLevel Attribute is server specific. It is assumed that all Variables can be accessed by at least one user. |
| Value | For Variables used as InstanceDeclarations, the value is server-specific; otherwise, it shall represent the value described in the text. |
| ArrayDimensions | If the ValueRank does not identify an array of a specific dimension (i.e. ValueRank <= 0) the ArrayDimensions can either be set to null or the Attribute is missing. This behaviour is server specific. If the ValueRank specifies an array of a specific dimension (i.e. ValueRank > 0) then the ArrayDimensions Attribute shall be specified in the table defining the Variable. |
| Historizing | The value for the Historizing Attribute is server specific. |
| AccessLevelEx | If the AccessLevelEx Attribute is provided, it shall have the bits 8, 9, and 10 set to 0, meaning that read and write operations on an individual Variable are atomic, and arrays can be partly written. |
3.4.3.4 VariableTypes
For all VariableTypes specified in this specification, the Attributes named in Table 8 be set as specified in the table. The definitions for the Attributes can be found in OPC 10000-3.
| Attributes | Value |
| Value | Optionally a server-specific default value can be provided. |
| ArrayDimensions | If the ValueRank does not identify an array of a specific dimension (i.e. ValueRank <= 0) the ArrayDimensions can either be set to null or the Attribute is missing. This behaviour is server specific. If the ValueRank specifies an array of a specific dimension (i.e. ValueRank > 0) then the ArrayDimensions Attribute shall be specified in the table defining the VariableType. |
3.4.3.5 Methods
For all Methods specified in this specification, the Attributes named in Table 9 shall be set as specified in the table. The definitions for the Attributes can be found in OPC 10000-3.
| Attributes | Value |
| Executable | All Methods defined in this specification shall be executable (Executable Attribute set to "True") unless it is defined differently in the Method definition. |
| UserExecutable | The value of the UserExecutable Attribute is server specific. It is assumed that all Methods can be executed by at least one user. |
3.4.3.6 Expanding conventions
For the following illustrations, the legend is as follows:
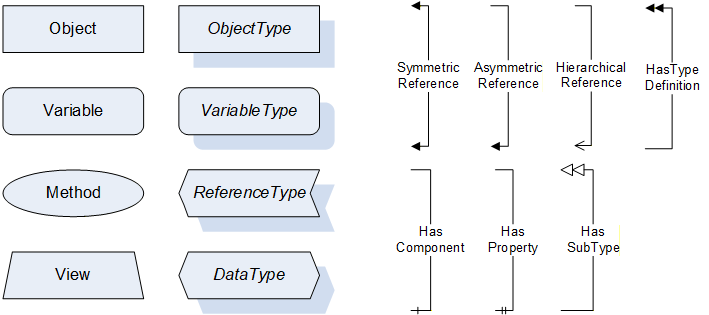
Additional definitions:
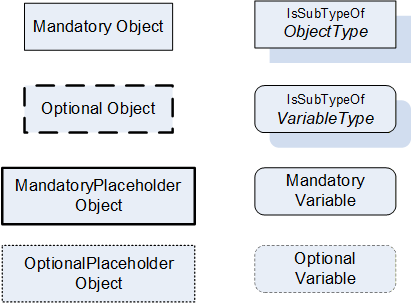
Table 10 describes the additional definitions.
| Node element | Graphical representation | Definition of node element |
| Mandatory Object | Rectangular Frame | A mandatory object with its type definition |
| Optional Object | Rectangular bold dashed Frame | An optional object with its type definition |
| Mandatory Placeholder Object | Rectangular bold Frame | A mandatory placeholder for objects with its type definition |
| Optional Placeholder Object | Rectangular dotted Frame | An optional placeholder for objects with its type definition |
| ObjectType | Rectangular Frame with shadow | An object type with its type definition |
| VariableType | Rounded rectangular Frame with shadow | A variable type with its type definition |
| Mandatory Variable | Rectangular Frame with rounded corners | A mandatory variable with its type definition |
| Optional Variable | Dotted rectangular Frame with rounded corners | An optional variable with its type definition |
3.4.3.7 Handling of not supported properties
In case of not supported Properties the following default shall be provided:
Properties with DataType String: empty string
Properties with DataType LocalizedText: empty text field
RevisionCounter Property: - 1