
1 Scope
This document specifies the OPC UA Information Model to represent the Objects and services that comprise all kinds of drive characteristics and drive functionality in form of a drive functional model as defined in chapter 6.
OPC Foundation
OPC is the interoperability standard for the secure and reliable exchange of data and information in the industrial automation space and in other industries. It is platform independent and ensures the seamless flow of information among devices from multiple vendors. The OPC Foundation is responsible for the development and maintenance of this standard.
OPC UA is a platform independent service-oriented architecture that integrates all the functionality of the individual OPC Classic specifications into one extensible framework. This multi-layered approach accomplishes the original design specification goals of:
Platform independence: from an embedded microcontroller to cloud-based infrastructure
Secure: encryption, authentication, authorisation and auditing
Extensible: ability to add new features including transports without affecting existing applications
Comprehensive information modelling capabilities: for defining any model from simple to complex
PROFINET Standardization Group (PNO)
The PROFIBUS and PROFINET user organization (PNO: Profibus Nutzerorganisation e. V.) was founded in 1989 and is the largest automation community in the world and responsible for PROFIBUS and PROFINET, the two most important enabling technologies in automation today. The PNO is member of PROFIBUS and PROFINET International (PI).
The common interest of the PNO global network of vendors, developers, system integrators and end users covering all industries lies in promoting, supporting and using PROFINET. Regionally and globally about 1,400 member companies are working closely together to the best automation possible. No other fieldbus organization in the world has the same kind of global influence and reach.
2 Normative references
The following referenced documents are indispensable for the application of this document. For dated references, only the edition cited applies. For undated references, the latest edition of the referenced document (including any amendments and errata) applies.
OPC 10000-1, OPC Unified Architecture - Part 1: Overview and Concepts
OPC 10000-1
OPC 10000-2, OPC Unified Architecture - Part 2: Security Model
OPC 10000-2
OPC 10000-3, OPC Unified Architecture V1.05 - Part 3: Address Space Model
OPC 10000-3
OPC 10000-4, OPC Unified Architecture V1.05 - Part 4: Services
OPC 10000-4
OPC 10000-5, OPC Unified Architecture V1.05 - Part 5: Information Model
OPC 10000-5
OPC 10000-6, OPC Unified Architecture V1.05 - Part 6: Mappings
OPC 10000-6
OPC 10000-7, OPC Unified Architecture - Part 7: Profiles
OPC 10000-7
OPC 10000-8, OPC Unified Architecture - Part 8: Data Access
OPC 10000-8
OPC 10000-9, OPC Unified Architecture V1.05 - Part 9: Alarms and Conditions
http://www.opcfoundation.org/UA/Part9/
OPC 10000-18, OPC Unified Architecture - Part 18: Role-Based Security
OPC 10000-18
OPC 10000-23, OPC Unified Architecture V1.05 - Part 23: Common ReferenceTypes
OPC 10000-23
OPC 10000-100, OPC Unified Architecture - Part 100: Devices
OPC 10000-100
OPC 10000-81, OPC UA Field eXchange - Connecting Devices and Information Model -
Date: January 2023
http://www.opcfoundation.org/UA/FX/
OPC 40001-1, OPC UA for Machinery - Basic Building Blocks - Version 1.03.0 - Date: August 2023
http://www.opcfoundation.org/UA-Profile/Machinery/
OPC 40400-1, OPC UA for Powertrain - Asset Management - RC 1.0 - Date: Juni 2023
http://www.opcfoundation.org/UA-Profile/Powertrain/
OPC 30140 PN, OPC UA for PROFINET - Release V1.00.1 - Date: March 2021 -
Order No.: 30140
OPC 30142 RIO, OPC UA for PROFINET Remote IO - Release V1.0 - Date: May 2022
| Order No.: 30142 |
OPC 30143 ENC, OPC UA for PROFINET Encoder - Release V1.0 - Date: April 2023
Order No.: 30143
OPC 30144 GSD, OPC UA for PROFINET GSD Generic Model - Release V1.0 -
Date: June 2023 - Order No.: 30144
PI 3162 ENCP, Profile Drive Technology - Encoder Profile - Version 4.2 - Date: March 2017 -
Order No.: 3.162
PI 3172 PDP, Profile Drive Technology - PROFIdrive Profile - Version 4.2 -
Date: October 2015 - Order Nr: 3.172
3 Terms, abbreviated terms and conventions
3.1 Overview
It is assumed that basic concepts of OPC UA information modelling and Profile Drive Technology - Encoder Profile [PI 3162 ENCP] are understood in this document. This document will use these concepts to describe the PROFINET Drives Information Model. For the purposes of this document, the terms and definitions given in OPC 10000-1, OPC 10000-3, OPC 10000-4, OPC 10000-5, OPC 10000-6, OPC 10000-7, OPC 10000-8, OPC 10000-9, OPC 10000-18, OPC 10000-23, OPC 10000-100, [OPC 10000-81], [OPC 40001-1], [OPC 40400-1], [OPC 30140 PN], [OPC 30142 RIO], [OPC 30143 ENC], [OPC 30144 GSD], [PI 3162 ENCP], [PI 3172 PDP] as well as the following apply.
Note that OPC UA terms and terms defined in this document are italicized in the document.
3.2 OPC UA for PROFINET Drives Terms from Profile Drive Technology - Encoder Profile [PI 3162 ENCP]
Excerpt from [PI 3162 ENCP], chapter 4.1.
3.2.1 Untitled
Data, which a device cyclically receives from the controller and which it outputs to the device application or the peripherals.
3.3 Term defined for this document
3.3.1 Untitled
The Controller is a controlling device which is associated with one or more drives (axis). Related to the automation system, the Controller is the host for the overall automation (see [PI 3172 PDP], chapter 6.1.2).
3.3.2 A Drive is understood in this specification as Device equipped with one or more motors controlled by the application which has control priority.
3.3.3 A PROFINET Drive is a Drive which is controlled over a PROFINET interface in normal operation.
3.3.4 Drive Object
A Drive Object is a part of a Drive Unit and contains the Process Control Task. The Drive Object shall have Parameters as a minimum functionality (see [PI 3172 PDP], chapter 6.1.3.4).
3.4 Abbreviated terms
| AR | Application Relation |
| PLC | Programmable Logic Controller |
Excerpt from [PI 3162 ENCP], chapter 4.2:
| DO | Drive Object |
| DU | Drive Unit |
3.5 Conventions used in this document
3.5.1 Conventions for Node descriptions
3.5.1.1 Node definitions
Node definitions are specified using tables (see Table 2).
Attributes are defined by providing the Attribute name and a value, or a description of the value.
References are defined by providing the ReferenceType name, the BrowseName of the TargetNode and its NodeClass.
If the TargetNode is a component of the Node being defined in the table the Attributes of the composed Node are defined in the same row of the table.
The DataType is only specified for Variables; "[<number>]" indicates a single-dimensional array, for multi-dimensional arrays the expression is repeated for each dimension (e.g. [2][3] for a two-dimensional array). For all arrays the ArrayDimensions is set as identified by <number> values. If no <number> is set, the corresponding dimension is set to 0, indicating an unknown size. If no number is provided at all the ArrayDimensions can be omitted. If no brackets are provided, it identifies a scalar DataType and the ValueRank is set to the corresponding value (see OPC 10000-3). In addition, ArrayDimensions is set to null or is omitted. If it can be Any or ScalarOrOneDimension, the value is put into "{<value>}", so either "{Any}" or "{ScalarOrOneDimension}" and the ValueRank is set to the corresponding value (see OPC 10000-3) and the ArrayDimensions is set to null or is omitted. Examples are given in Table 1.
| Notation | DataType | ValueRank | ArrayDimensions | Description |
| 0:Int32 | 0:Int32 | -1 | omitted or null | A scalar Int32. |
| 0:Int32[] | 0:Int32 | 1 | omitted or {0} | Single-dimensional array of Int32 with an unknown size. |
| 0:Int32[][] | 0:Int32 | 2 | omitted or {0,0} | Two-dimensional array of Int32 with unknown sizes for both dimensions. |
| 0:Int32[3][] | 0:Int32 | 2 | {3,0} | Two-dimensional array of Int32 with a size of 3 for the first dimension and an unknown size for the second dimension. |
| 0:Int32[5][3] | 0:Int32 | 2 | {5,3} | Two-dimensional array of Int32 with a size of 5 for the first dimension and a size of 3 for the second dimension. |
| 0:Int32{Any} | 0:Int32 | -2 | omitted or null | An Int32 where it is unknown if it is scalar or array with any number of dimensions. |
| 0:Int32{ScalarOrOneDimension} | 0:Int32 | -3 | omitted or null | An Int32 where it is either a single-dimensional array or a scalar. |
The TypeDefinition is specified for Objects and Variables.
The TypeDefinition column specifies a symbolic name for a NodeId, i.e. the specified Node points with a HasTypeDefinition Reference to the corresponding Node.
The ModellingRule of the referenced component is provided by specifying the symbolic name of the rule in the ModellingRule column. In the AddressSpace, the Node shall use a HasModellingRule Reference to point to the corresponding ModellingRule Object.
If the NodeId of a DataType is provided, the symbolic name of the Node representing the DataType shall be used.
Note that if a symbolic name of a different namespace is used, it is prefixed by the NamespaceIndex (see 3.6.2.2).
Nodes of all other NodeClasses cannot be defined in the same table; therefore, only the used ReferenceType, their NodeClass and their BrowseName are specified. A reference to another part of this document points to their definition. Table 2 illustrates the table. If no components are provided, the DataType, TypeDefinition and Other columns may be omitted and only a Comment column is introduced to point to the Node definition.
Each Type Node or well-known Instance Node defined shall have one or more ConformanceUnits defined in 10.1 that require the Node to be in the AddressSpace.
The relations between Nodes and ConformanceUnits are defined at the end of the tables defining Nodes, one row per ConformanceUnit. The ConformanceUnits are reflected in the Category element for the Node definition in the UANodeSet (see OPC 10000-6).
The list of ConformanceUnits in the UANodeSet allows Servers to optimize resource consumption by using a list of supported ConformanceUnits to select a subset of the Nodes in an Information Model.
When a Node is selected in this way, all dependencies implied by the References are also selected.
Dependencies exist if the Node is the source of HasTypeDefinition, HasInterface, HasAddIn or any HierarchicalReference. Dependencies also exist if the Node is the target of a HasSubtype Reference. For Variables and VariableTypes, the value of the DataType Attribute is a dependency. For DataType Nodes, any DataTypes referenced in the DataTypeDefinition Attribute are also dependencies.
For additional details see OPC 10000-5.
| Attribute | Value | ||||
| Attribute name | Attribute value. If it is an optional Attribute that is not set "--" is used. | ||||
| References | NodeClass | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| ReferenceType name | NodeClass of the target Node. | BrowseName of the target Node. | DataType of the referenced Node, only applicable for Variables. | TypeDefinition of the referenced Node, only applicable for Variables and Objects. | Additional characteristics of the TargetNode such as the ModellingRule or AccessLevel. |
| NOTE Notes referencing footnotes of the table content. | |||||
| Conformance Units | |||||
|---|---|---|---|---|---|
| Name of ConformanceUnit, one row per ConformanceUnit |
Components of Nodes can be complex that is containing components by themselves. The TypeDefinition, NodeClass and DataType can be derived from the type definitions, and the symbolic name can be created as defined in 3.6.3.1. Therefore, those containing components are not explicitly specified; they are implicitly specified by the type definitions.
The Other column defines additional characteristics of the Node. Examples of characteristics that can appear in this column are show in Table 3.
| Name | Short Name | Description |
| 0:Mandatory | M | The Node has the Mandatory ModellingRule. |
| 0:Optional | O | The Node has the Optional ModellingRule. |
| 0:MandatoryPlaceholder | MP | The Node has the MandatoryPlaceholder ModellingRule. |
| 0:OptionalPlaceholder | OP | The Node has the OptionalPlaceholder ModellingRule. |
| ReadOnly | RO | The Node AccessLevel has the CurrentRead bit set but not the CurrentWrite bit. |
| ReadWrite | RW | The Node AccessLevel has the CurrentRead and CurrentWrite bits set. |
| WriteOnly | WO | The Node AccessLevel has the CurrentWrite bit set but not the CurrentRead bit. |
If multiple characteristics are defined they are separated by commas. The name or the short name may be used.
3.5.1.2 Additional References
To provide information about additional References, the format as shown in Table 4 is used.
| SourceBrowsePath | Reference Type | Is Forward | TargetBrowsePath |
| SourceBrowsePath is always relative to the TypeDefinition. Multiple elements are defined as separate rows of a nested table. | ReferenceType name | True = forward Reference. | TargetBrowsePath points to another Node, which can be a well-known instance or a TypeDefinition. You can use BrowsePaths here as well, which is either relative to the TypeDefinition or absolute. If absolute, the first entry needs to refer to a type or well-known instance, uniquely identified within a namespace by the BrowseName. |
References can be to any other Node.
3.5.1.3 Additional sub-components
To provide information about sub-components, the format as shown in Table 5 is used.
| BrowsePath | References | NodeClass | BrowseName | DataType | TypeDefinition | Others |
| BrowsePath is always relative to the TypeDefinition. Multiple elements are defined as separate rows of a nested table | NOTE Same as for Table 2 | |||||
3.5.1.4 Additional Attribute values
The type definition table provides columns to specify the values for required Node Attributes for InstanceDeclarations. To provide information about additional Attributes, the format as shown in Table 6 is used.
| BrowsePath | <Attribute name> Attribute |
| BrowsePath is always relative to the TypeDefinition. Multiple elements are defined as separate rows of a nested table | The values of attributes are converted to text by adapting the reversible JSON encoding rules defined in OPC 10000-6. If the JSON encoding of a value is a JSON string or a JSON number then that value is entered in the value field. Double quotes are not included. If the DataType includes a NamespaceIndex (QualifiedNames, NodeIds or ExpandedNodeIds) then the notation used for BrowseNames is used. If the value is an Enumeration the name of the enumeration value is entered. If the value is a Structure then a sequence of name and value pairs is entered. Each pair is followed by a newline. The name is followed by a colon. The names are the names of the fields in the DataTypeDefinition. If the value is an array of non-structures then a sequence of values is entered where each value is followed by a newline. If the value is an array of Structures or a Structure with fields that are arrays or with nested Structures then the complete JSON array or JSON object is entered. Double quotes are not included. |
There can be multiple columns to define more than one Attribute.
3.5.2 NodeIds and BrowseNames
3.5.2.1 NodeIds
The NodeIds of all Nodes described in this standard are only symbolic names. Annex A defines the actual NodeIds.
The symbolic name of each Node defined in this document is its BrowseName, or, when it is part of another Node, the BrowseName of the other Node, a ".", and the BrowseName of itself. In this case "part of" means that the whole has a HasProperty or HasComponent Reference to its part. Since all Nodes not being part of another Node have a unique name in this document, the symbolic name is unique.
The NamespaceUri for all NodeIds defined in this document is defined in Annex A. The NamespaceIndex for this NamespaceUri is vendor-specific and depends on the position of the NamespaceUri in the server namespace table.
Note that this document not only defines concrete Nodes, but also requires that some Nodes shall be generated, for example one for each Session running on the Server. The NodeIds of those Nodes are Server-specific, including the namespace. But the NamespaceIndex of those Nodes cannot be the NamespaceIndex used for the Nodes defined in this document, because they are not defined by this document but generated by the Server.
3.5.2.2 BrowseNames
The text part of the BrowseNames for all Nodes defined in this document is specified in the tables defining the Nodes. The NamespaceUri for all BrowseNames defined in this document is defined in 11.2.
For InstanceDeclarations of NodeClass Object and Variable that are placeholders (OptionalPlaceholder and MandatoryPlaceholder ModellingRule), the BrowseName and the DisplayName are enclosed in angle brackets (<>) as recommended in OPC 10000-3. If the BrowseName is not defined by this document, a namespace index prefix is added to the BrowseName (e.g., prefix '0' leading to '0:EngineeringUnits' or prefix '2' leading to '2:DeviceRevision'). This is typically necessary if a Property of another specification is overwritten or used in the OPC UA types defined in this document. Table 56 provides a list of namespaces and their indexes as used in this document.
3.5.3 Common Attributes
3.5.3.1 General
The Attributes of Nodes, their DataTypes and descriptions are defined in OPC 10000-3. Attributes not marked as optional are mandatory and shall be provided by a Server. The following tables define if the Attribute value is defined by this document or if it is server-specific.
For all Nodes specified in this document, the Attributes named in Table 7 shall be set as specified in the table.
| Attribute | Value |
| DisplayName | The DisplayName is a LocalizedText. Each Server shall provide the DisplayName identical to the BrowseName of the Node for the LocaleId "en". Whether the server provides translated names for other LocaleIds are server-specific. |
| Description | Optionally a server-specific description is provided. |
| NodeClass | Shall reflect the NodeClass of the Node. |
| NodeId | The NodeId is described by BrowseNames as defined in 3.6.2.1. |
| WriteMask | Optionally the WriteMask Attribute can be provided. If the WriteMask Attribute is provided, it shall set all non-server-specific Attributes to not writable. For example, the Description Attribute may be set to writable since a Server may provide a server-specific description for the Node. The NodeId shall not be writable, because it is defined for each Node in this document. |
| UserWriteMask | Optionally the UserWriteMask Attribute can be provided. The same rules as for the WriteMask Attribute apply. |
| RolePermissions | Optionally server-specific role permissions can be provided. |
| UserRolePermissions | Optionally the role permissions of the current Session can be provided. The value is server-specific and depends on the RolePermissions Attribute (if provided) and the current Session. |
| AccessRestrictions | Optionally server-specific access restrictions can be provided. |
3.5.3.2 Objects
For all Objects specified in this document, the Attributes named in Table 8 shall be set as specified in the Table 8. The definitions for the Attributes can be found in OPC 10000-3.
| Attribute | Value |
| EventNotifier | Whether the Node can be used to subscribe to Events or not is server-specific. |
3.5.3.3 Variables
For all Variables specified in this document, the Attributes named in Table 9 shall be set as specified in the table. The definitions for the Attributes can be found in OPC 10000-3.
| Attribute | Value |
| MinimumSamplingInterval | Optionally, a server-specific minimum sampling interval is provided. |
| AccessLevel | The access level for Variables used for type definitions is server-specific, for all other Variables defined in this document, the access level shall allow reading; other settings are server-specific. |
| UserAccessLevel | The value for the UserAccessLevel Attribute is server-specific. It is assumed that all Variables can be accessed by at least one user. |
| Value | For Variables used as InstanceDeclarations, the value is server-specific; otherwise it shall represent the value described in the text. |
| ArrayDimensions | If the ValueRank does not identify an array of a specific dimension (i.e. ValueRank <= 0) the ArrayDimensions can either be set to null or the Attribute is missing. This behaviour is server-specific. If the ValueRank specifies an array of a specific dimension (i.e. ValueRank > 0) then the ArrayDimensions Attribute shall be specified in the table defining the Variable. |
| Historizing | The value for the Historizing Attribute is server-specific. |
| AccessLevelEx | If the AccessLevelEx Attribute is provided, it shall have the bits 8, 9, and 10 set to 0, meaning that read and write operations on an individual Variable are atomic, and arrays can be partly written. |
3.5.3.4 VariableTypes
For all VariableTypes specified in this document, the Attributes named in Table 10 shall be set as specified in the table. The definitions for the Attributes can be found in OPC 10000-3.
| Attributes | Value |
| Value | Optionally a server-specific default value can be provided. |
| ArrayDimensions | If the ValueRank does not identify an array of a specific dimension (i.e. ValueRank <= 0) the ArrayDimensions can either be set to null or the Attribute is missing. This behaviour is server-specific. If the ValueRank specifies an array of a specific dimension (i.e. ValueRank > 0) then the ArrayDimensions Attribute shall be specified in the table defining the VariableType. |
3.5.3.5 Methods
For all Methods specified in this document, the Attributes named in Table 11 shall be set as specified in the table. The definitions for the Attributes can be found in OPC 10000-3.
| Attributes | Value |
| Executable | All Methods defined in this document shall be executable (Executable Attribute set to "True"), unless it is defined differently in the Method definition. |
| UserExecutable | The value of the UserExecutable Attribute is server-specific. It is assumed that all Methods can be executed by at least one user. |
4 General information to PROFINET Drives and OPC UA
4.1 Introduction to PROFINET Drives
PROFINET is a widely used communication ecosystem for the OT level of industrial automation, and drives are a main component in automation systems for factory automation and process control. In the PROFINET ecosystem the PROFIdrive application profile is used for an interoperable drive interface on PROFINET and PROFIBUS. Because drives offer a lot of process and maintenance relevant information, they are predestined to offer their data via OPC UA to IT clients.
4.1.1 Drive Model
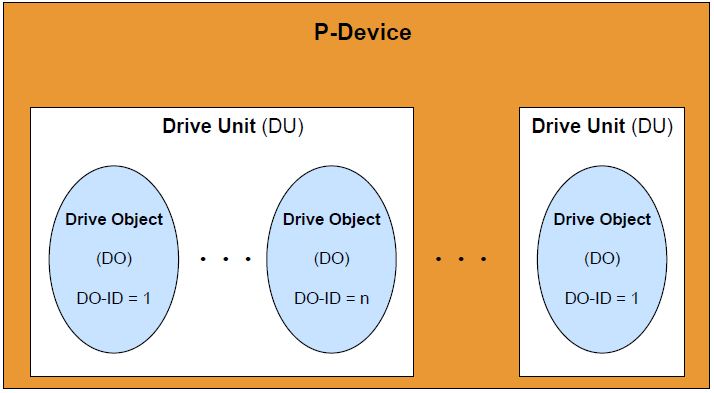
The PROFIdrive Drive Model is defined in [PI 3172 PDP] and defines the "Drive Object" (DO) as the main architectural element. The DO is the representative for the Drive Axis functionality further defined in [PDP] and is also used to represent additional auxiliary drive functionality like Infeed, Encoder and Control Units as an option. Therefore, being the main architectural object, the DO is used for the addressing of different axis within a Drive Device, by using the unique DO-ID or the assigned PROFINET module number. Figure 1 shows the PROFIdrive device model, where the P-Device represents the PROFINET Device hosting the Drive Objects as representatives for a Drive Axis functionality. The Drive Unit is used for internal Device structuring only and is not of further relevance for the functional information model.
4.1.2 Drive Object
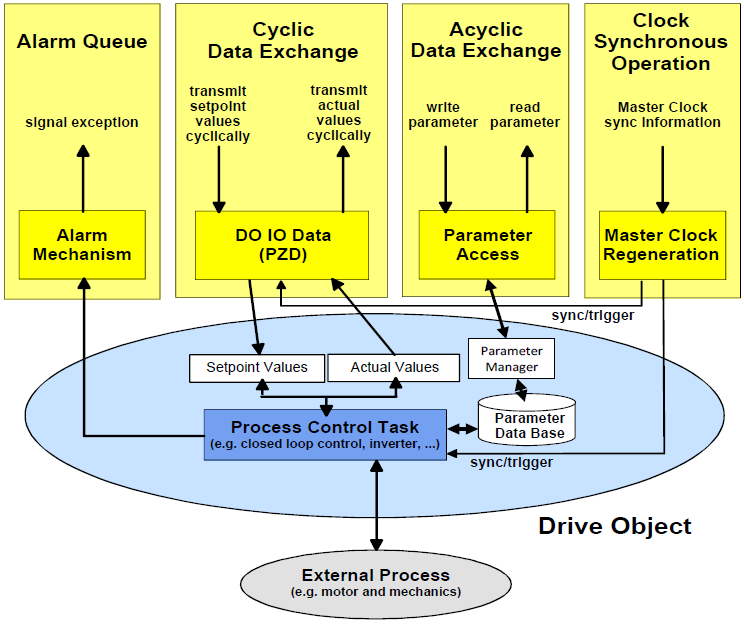
The Drive Object (DO) is the main component of the Drive functional model. Figure 2 shows the general architecture of the PROFIdrive Drive Object and its related PROFINET communication services. Main purpose of this companion specification is the functional model of a Drive Axis which is contained in the blue "Process Control Task" block of Figure 2. All information's about the "Process Control Task" are available as parameters in the related "Parameter Data Base" and therefore accessible via PROFINET acyclic communication and the related "Parameter Manager". As an option, the "Setpoint Values" and "Actual Values" used to control the "Process Control Task" by PROFINET cyclic data telegrams, are also part of the OPC UA Axis Information Model (see folder PNSignals in Figure 10).
4.1.3 Axis type Drive Object
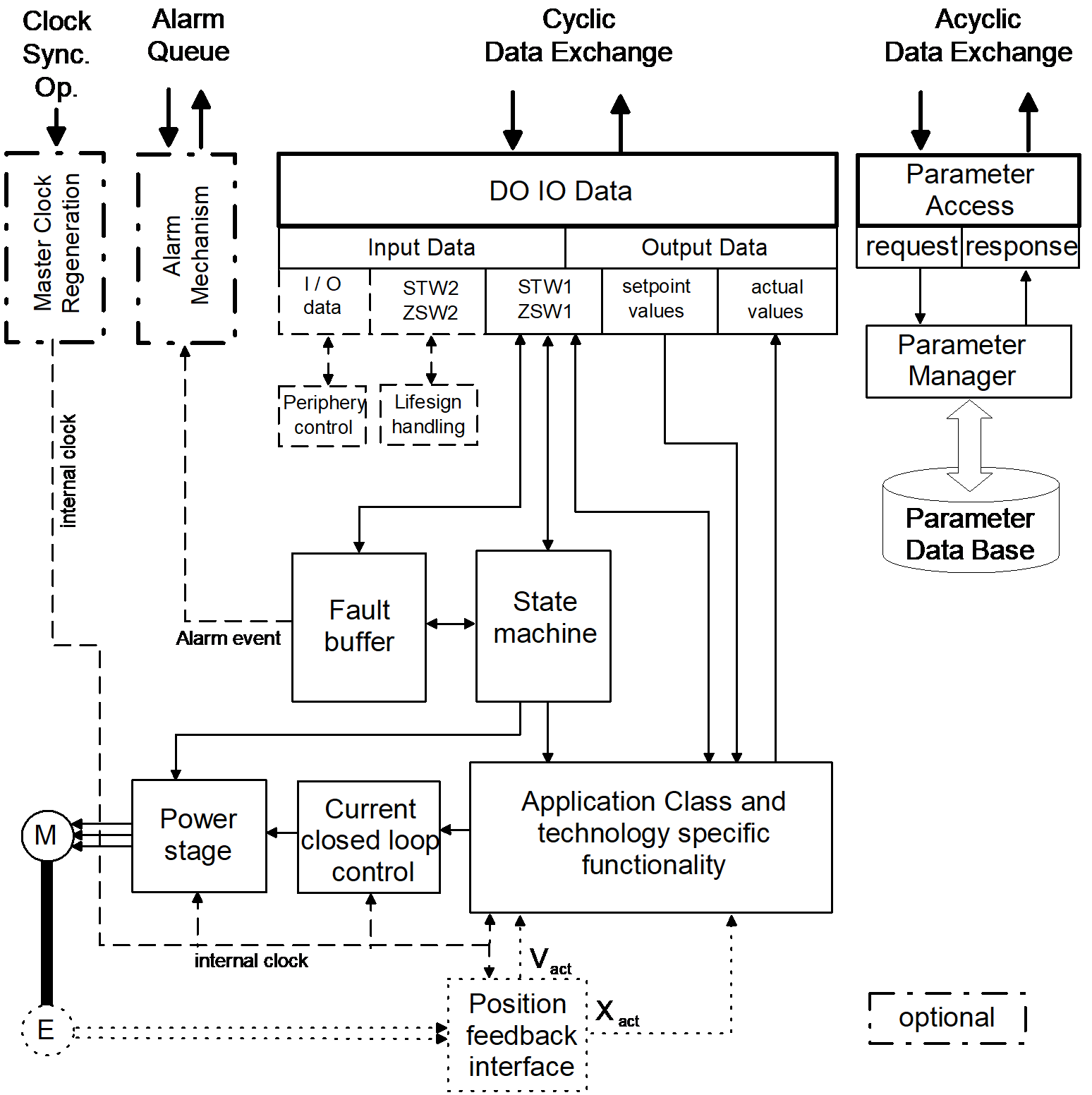
The main Drive Object types, which are the scope of standardization in the PROFIdrive profile, are of axis type. The Axis Drive Object types contain an electric, pneumatic or hydraulic actuator like a motor, together with the actor related control structures as shown in Figure 3. Mandatory functionality of all Axis Type Drive Objects is the Axis state machine for the control of the actor power stage and control functions. In addition, every Axis Type Drive Object offers a standardized fault buffer for the management and tracing of fault and warning situations of the axis. The amount and quality of control structures inside the Axis Drive Object is dependent on the overall application scenario, where the drive axis is embedded. For the classification of such standardized application scenarios, the PROFIdrive standard defines the PROFIdrive Application Classes.
Other logical objects which are defined in the context of a PROFIdrive Axis/DO:
Objects for DO identification.
Parameters for accessing information and settings of the individual function modules.
Objects for drive control (for example, control words and status words).
Objects for setpoint processing (for example, setpoint values and actual values).
Objects for diagnostics and monitoring (for example, messages, alarms, faults).
Objects for integrated sensor interface(s).
4.1.4 Axis types and PROFIdrive Application Classes
For the standardization of commonly used axis types PROFIdrive [PI 3172 PDP] defines the PROFIdrive Application Classes as defined in [PDP] and shown in Table 12. These Application Classes are the base for the definition of the DriveAxisTypes in this Companion Specification (see Figure 12).
| No. | Application Class | Interface | Functions b |
|---|---|---|---|
| 1 | Standard Drive | n-setpoint, torque-setpoint, current-setpoint | Cyclic IO Data interface a |
| 2 | Standard drive with distributed technology controller (continuous process) | Technological setpoint-actual values (command variables) | Cyclic IO Data interface with Drive to Drive communication a |
| 3 | Single Axis positioning drive, with local Motion Control | pos-setpoint, run requests | Cyclic IO Data interface a |
| 4 | Motion Control with central interpolation and speed setpoint interface Optional: DSC (Dynamic Servo Control) | n-setpoint x-actual additionally, for DSC: ∆x (xerr), KV (kPC) | Cyclic IO Data interface, Clock Synchronous Operation, DSC |
| 5 | Motion Control with central interpolation and position setpoint interface | x-setpoint | Cyclic IO Data interface, Clock Synchronous Operation |
| 6 | Motion control for clocked processes, or distributed angular synchronism | Command variables, motion instructions | Cyclic IO Data interface, Clock Synchronous Operation, Drive to Drive communication |
a The cyclic interface may also be operated clock-synchronously if, for example, it is a question of synchrony of the actions in the case of several drives. b For all Application Classes: acyclic interface for parameters, diagnostics, identification. | |||
4.1.5 Drive Communication Model
Most PROFINET Drives still support the PROFIdrive profile. PROFIdrive offers an interoperable interface for the access to standard parameters and vendor specific parameters. This offers the possibility for an edge device to use the PROFIdrive profile as a standardized interface for the access to drive data via PROFINET and PROFIBUS.
Nevertheless, the OPC UA information model of this specification is not limited to PROFIdrive devices, because the mandatory parts of the information model are independent from PROFIdrive and quite common to all drives, independent on their communication interface. Therefore, all drives with PROFINET interface and their own OPC UA Server on board can use the Information Model out of this specification. Additional benefit for drives with PROFIdrive (using PROFINET or PROFIBUS) is, that brownfield Devices can be represented by an OPC UA Server in an edge or proxy Device (like a PLC cell Controller) by using a generic mapping based on the PROFIdrive application model and using the PROFIdrive parameter channel as generic transport interface.
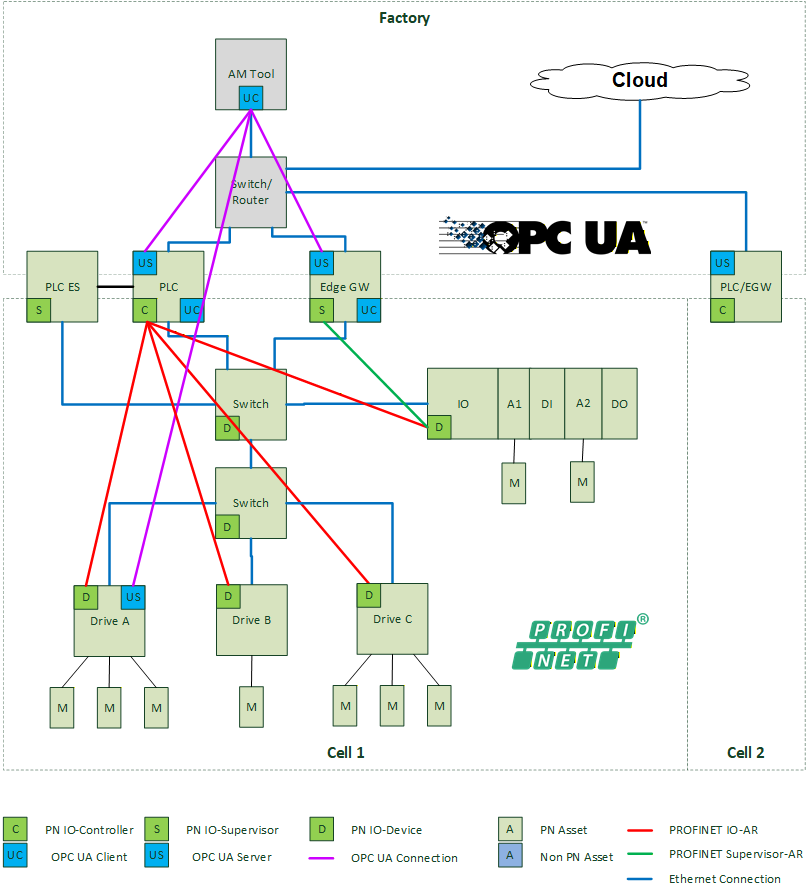
Figure 4 shows different possibilities for Vertical Communication and IT integration of PROFINET Drives in a typical automation scenario. Drive A in Figure 4 has it's own OPC UA server on board. The onboard OPC UA Server of Drive A contains the standardized information model out of this companion specification and may contain in addition vendor specific extensions to the standardized Information Model as well as additional independent vendor specific Information Models. Because of PROFINET being real switched Ethernet, the PROFINET network in the OT areas is used to access the local OPC UA Servers in the OT area independent from the PROFNET communication.
Drives B, C and the Drive Axis modules in the IO-Station are brownfield Devices or cost sensitive Devices, offering only a PROFINET PROFIdrive interface without having an own OPC UA Server. For Vertical Communication and IT integration of these Drive Devices, they have to be proxied by an edge Device or the cell Controller PLC acting as proxy for the Information Model of the PROFINET Devices under its control. The proxy Devices use PROFINET communication and the PROFIdrive parameter channel to access data on the PROFIdrive Drive Devices in the OT level. With PROFIdrive Devices, the proxies can use a generic mapping of standardized PROFIdrive data into the standardized Information Model defined in this companion specification. In addition, also for these PROFINET only Devices, it is possible to extend the standardized Information Model by vendor specific extensions by using the PROFINET GSD Generic companion specification OPC UA part 30144 (see [OPC 30144 GSD]). With the GSD Generic approach, it is possible to advertise all information on additions to the OPC UA Information Model and related PROFINET data communication by additions to the standard PROFINET GSD. Therefore, the GSD Generic approach is easily applicable for brownfield Devices and plain PROFINET Devices.
4.2 Introduction to OPC Unified Architecture
4.2.1 What is OPC UA?
OPC UA is an open and royalty free set of standards designed as a universal communication protocol. While there are numerous communication solutions available, OPC UA has key advantages:
A state of art security model (see OPC 10000-2).
A fault tolerant communication protocol.
An information modelling framework that allows application developers to represent their data in a way that makes sense to them.
OPC UA has a broad scope which delivers for economies of scale for application developers. This means that a larger number of high-quality applications at a reasonable cost are available. When combined with semantic models such as PROFINET Drives, OPC UA makes it easier for end users to access data via generic commercial applications.
The OPC UA model is scalable from small devices to ERP systems. OPC UA Servers process information locally and then provide that data in a consistent format to any application requesting data - ERP, MES, PMS, Maintenance Systems, HMI, Smartphone or a standard Browser, for examples. For a more complete overview see OPC 10000-1.
4.2.2 Basics of OPC UA
As an open standard, OPC UA is based on standard internet technologies, like TCP/IP, HTTP, Web Sockets.
As an extensible standard, OPC UA provides a set of Services (see OPC 10000-4) and a basic information model framework. This framework provides an easy manner for creating and exposing vendor defined information in a standard way. More importantly all OPC UA Clients are expected to be able to discover and use vendor-defined information. This means OPC UA users can benefit from the economies of scale that come with generic visualisation and historian applications. This specification is an example of an OPC UA Information Model designed to meet the needs of developers and users.
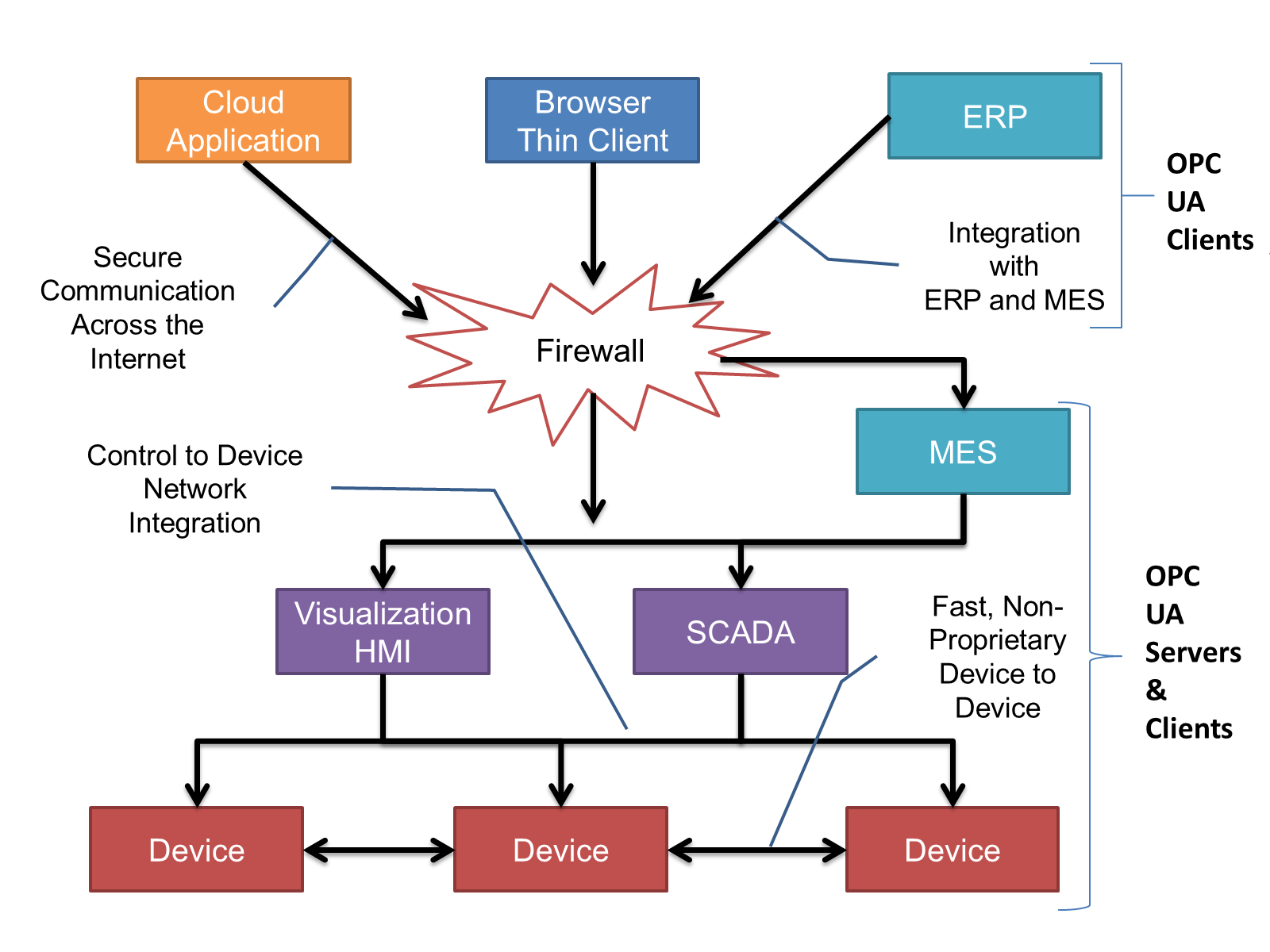
OPC UA Clients can be any consumer of data from another device on the network to browser based thin clients and ERP systems. The full scope of OPC UA applications is shown in Figure 5.
OPC UA provides a robust and reliable communication infrastructure having mechanisms for handling lost messages, failover, heartbeat, etc. With its binary encoded data, it offers a high-performing data exchange solution. Security is built into OPC UA as security requirements become more and more important especially since environments are connected to the office network or the internet and attackers are starting to focus on automation systems.
4.2.3 Information modelling in OPC UA
4.2.3.1 Concepts
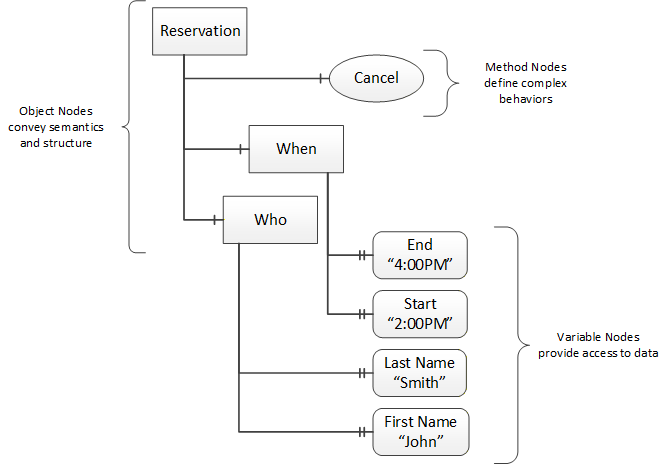
OPC UA provides a framework that can be used to represent complex information as Objects in an AddressSpace which can be accessed with standard services. These Objects consist of Nodes connected by References. Different classes of Nodes convey different semantics. For example, a Variable Node represents a value that can be read or written. The Variable Node has an associated DataType that can define the actual value, such as a string, float, structure etc. It can also describe the Variable value as a variant. A Method Node represents a function that can be called. Every Node has a number of Attributes including a unique identifier called a NodeId and non-localized name called as BrowseName. An Object representing a 'Reservation' is shown in Figure 6.
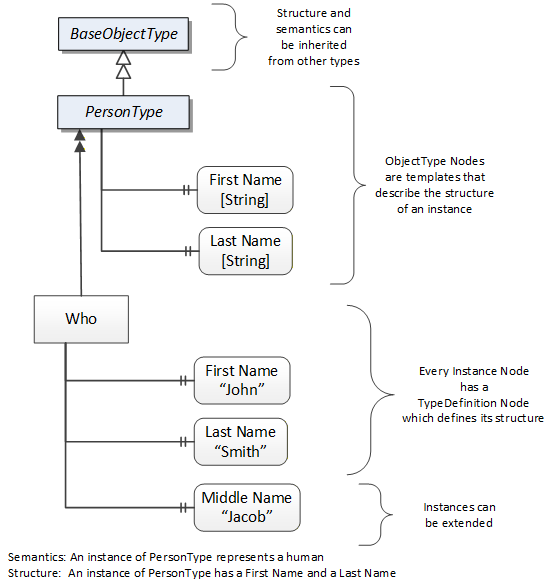
Object and Variable Nodes represent instances and they always reference a TypeDefinition (ObjectType or VariableType) Node which describes their semantics and structure. Figure 7 illustrates the relationship between an instance and its TypeDefinition.
The type Nodes are templates that define all of the children that can be present in an instance of the type. In the example in Figure 7 the PersonType ObjectType defines two children: First Name and Last Name. All instances of PersonType are expected to have the same children with the same BrowseNames. Within a type the BrowseNames uniquely identify the children. This means Client applications can be designed to search for children based on the BrowseNames from the type instead of NodeIds. This eliminates the need for manual reconfiguration of systems if a Client uses types that multiple Servers implement.
OPC UA also supports the concept of sub-typing. This allows a modeller to take an existing type and extend it. There are rules regarding sub-typing defined in OPC 10000-3, but in general they allow the extension of a given type or the restriction of a DataType. For example, the modeller may decide that the existing ObjectType in some cases needs an additional Variable. The modeller can create a subtype of the ObjectType and add the Variable. A Client that is expecting the parent type can treat the new type as if it was of the parent type. Regarding DataTypes, subtypes can only restrict. If a Variable is defined to have a numeric value, a sub type could restrict it to a float.
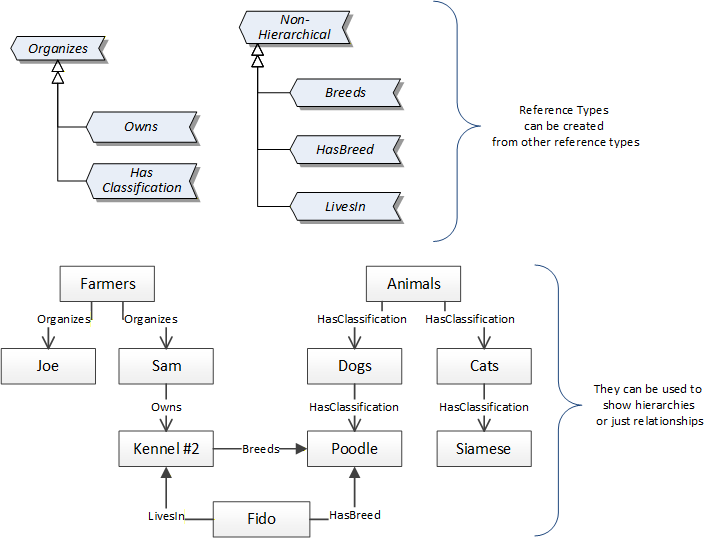
References allow Nodes to be connected in ways that describe their relationships. All References have a ReferenceType that specifies the semantics of the relationship. References can be hierarchical or non-hierarchical. Hierarchical references are used to create the structure of Objects and Variables. Non-hierarchical are used to create arbitrary associations. Applications can define their own ReferenceType by creating subtypes of an existing ReferenceType. Subtypes inherit the semantics of the parent but may add additional restrictions. Figure 8 depicts several References, connecting different Objects.
The figures above use a notation that was developed for the OPC UA specification. The notation is summarized in Figure 9. UML representations can also be used; however, the OPC UA notation is less ambiguous because there is a direct mapping from the elements in the figures to Nodes in the AddressSpace of an OPC UA Server.
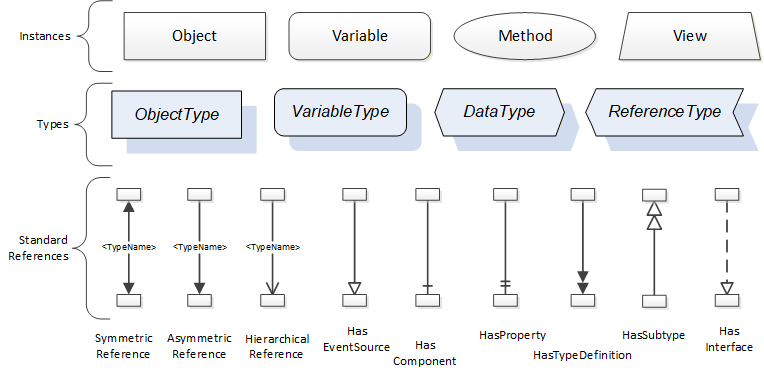
A complete description of the different types of Nodes and References can be found in OPC 10000-3 and the base structure is described in OPC 10000-5.
OPC UA specification defines a very wide range of functionality in its basic information model. It is not required that all Clients or Servers support all functionality in the OPC UA specifications. OPC UA includes the concept of Profiles, which segment the functionality into testable certifiable units. This allows the definition of functional subsets (that are expected to be implemented) within a companion specification. The Profiles do not restrict functionality, but generate requirements for a minimum set of functionality (see OPC 10000-7).
4.2.3.2 Namespaces
OPC UA allows information from many different sources to be combined into a single coherent AddressSpace. Namespaces are used to make this possible by eliminating naming and id conflicts between information from different sources. Each namespace in OPC UA has a globally unique string called a NamespaceUri which identifies a naming authority and a locally unique integer called a NamespaceIndex, which is an index into the Server's table of NamespaceUris. The NamespaceIndex is unique only within the context of a Session between an OPC UA Client and an OPC UA Server- the NamespaceIndex can change between Sessions and still identify the same item even though the NamespaceUri's location in the table has changed. The Services defined for OPC UA use the NamespaceIndex to specify the Namespace for qualified values.
There are two types of structured values in OPC UA that are qualified with NamespaceIndexes: NodeIds and QualifiedNames. NodeIds are locally unique (and sometimes globally unique) identifiers for Nodes. The same globally unique NodeId can be used as the identifier in a node in many Servers - the node's instance data may vary but its semantic meaning is the same regardless of the Server it appears in. This means Clients can have built-in knowledge of of what the data means in these Nodes. OPC UA Information Models generally define globally unique NodeIds for the TypeDefinitions defined by the Information Model.
QualifiedNames are non-localized names qualified with a Namespace. They are used for the BrowseNames of Nodes and allow the same names to be used by different information models without conflict. TypeDefinitions are not allowed to have children with duplicate BrowseNames; however, instances do not have that restriction.
4.2.3.3 Companion Specifications
An OPC UA companion specification for an industry specific vertical market describes an Information Model by defining ObjectTypes, VariableTypes, DataTypes and ReferenceTypes that represent the concepts used in the vertical market, and potentially also well-defined Objects as entry points into the AddressSpace.
5 Use cases
Table 13 lists possible use cases of interest for OPC UA Clients. Typically, the use case consists of utilization of OPC UA standard mechanisms and data processing at the Client site.
6 OPC UA for PROFINET Drives Functional Information Model Overview
6.1 Introduction to OPC UA for Drive Information Model
The Drive Information Model specifies Objects and Services representing Axis type Drive Objects. Although this specification uses concepts and definitions specified by the PROFIdrive profile (see [PI 3172 PDP]), the represented Drives do not necessarily comply to PROFIdrive. Instead, this specification aims to support all kinds of drives supporting a PROFINET communication interface. As a benefit for a PROFIdrive represented by the OPC UA information model out of this specification on an edge device, this specification defines the PROFIdrive parameter to be used to read out the variables and properties of the information model via acyclic PROFINET communication.
The comprehensive Information Model describes all aspects of a device or automation system, containing the asset partial model related to orderable components and the functional partial model related to the application function part of the system (see [OPC 30140 PN], chapter 6). The asset types to be used for the asset partial model are specified in [OPC 40400-1] (OPC UA for Powertrain, Part1: Asset Management). This specification document defines the functional model of a Drive axis, in a PROFIdrive device typically represented by a Drive Object. The possible connections (relations) enable the navigation between related Objects representing the same entity in different partial models are shown in [OPC 30140 PN], chapter 6; see D.1 also. For a Drive device it is also possible to add additional functional models like Energy Management [OPC PE] or analog and digital IO-Channels [OPC RIO] to the comprehensive Information Model, if this functionality is supported by the Drive device. For examples of the comprehensive Information Model see the appendix (see Figure 10).
OPC UA for PROFINET Drives defines all Objects and types provided by an OPC UA Server allowing OPC UA Clients to access data and services of Axis type Drive Objects by providing Axis Objects. As specified in [OPC 30142 RIO], the Information Model is divided into a PROFINET aspect and a functional aspect. The PROFINET aspect offers optional detailed Telegram information (See [OPC 30142 RIO]), the functional aspect provides an Information Model for Axis type Drive Objects. The optional Signal Objects (see [OPC 30142 RIO]) in the PROFINET aspect relate to components of the Axis Objects in the functional aspect by dedicated 0:RepresentsSameEntityAs References (see Figure 10).
The Axis Objects serve as the root containers for modelling of Axis type Drive Objects. The functional aspect of a Drive contains as many Axis Objects as needed to represent the Axis type Drive Objects of the PROFIdrive P-Device.
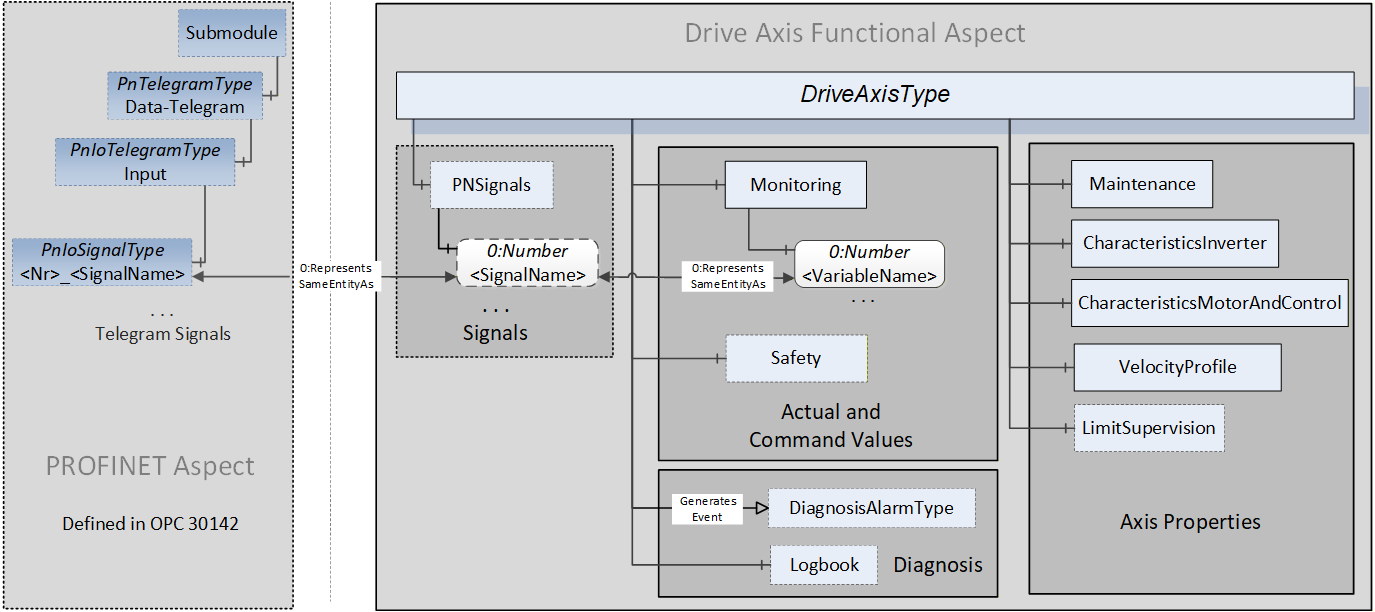
Figure 10 shows the organization of the Axis Object. The components of this DriveAxisType Object representing an Axis Object are part of the four different sub-aspects "Signals", "Actual and Command Values", "Diagnosis" and "Axis Properties".
The concrete ObjectTypes representing Axis type Drive Objects like VelocityDriveAxisType (see section 7.2) and FrequencyDriveAxisType (see section 7.3) are derived from the abstract DriveAxisType base ObjectType (see section 7.1). The base type contains all Variables and Properties common for all Axis Objects.
Within the Axis Object, the mandatory "Actual and Command Values" sub-aspect is mainly consisting of Variables which contain the setpoint and measurement values of an axis like velocity and acceleration represented as physical values in floating point data types. These Variables are used to address the use case for axis monitoring on a control panel and the use case for data mining.
In the optional "Signals" sub-aspect, the "PNSignals" folder Object contains the Variables representing the Signal as transmitted in the PROFINET Telegram as Value. These "Signals" address the use case for supervision or debugging of the original Signal values transmitted between the Motion Controller and the Drive Axis. If such a Signal contains the same information as a Variable out of the "Monitoring" folder, the Variables of these two sub-aspects are connected using the 0:RepresentsSameEntityAs ReferenceType (see Figure 11). Note, that Variables which are connected by the 0:RepresentsSameEntityAs ReferenceType may have the same DataType and Value or may have different DataType and Value, e.g. the velocity actual value as monitoring Variable is represented in float and unit U/min, while as Signal Variable represented in INT32 and unit % and N4 normalized.
The "Diagnosis" sub-aspect yields diagnosis data by providing the DiagnosisAlarmType Events. The Logbook Object provides access to the DriveAxisType Object's fault buffer.
The "Axis Properties" sub-aspect contains a collection of values which are of special interest for the functional identification and behaviour (configuration) of the Axis Object. These values are organized into several containers further structuring the sub-aspects.
Figure 11 shows a reduced Axis Object model with the relationships of the Signal Objects in the PROFINET aspect with the Variables providing concrete Values in the functional aspect. The figure shall give a basic understanding by demonstrating the model organization using Standard Signals transmitted with Standard Telegram 1 (see [PI 3172 PDP], chapter 6.3.4.3.2 and 6.3.4.4). As described, the transmitted Signals are given by the selection of one of the Standard Telegrams or by the setup of the free telegram configuration.
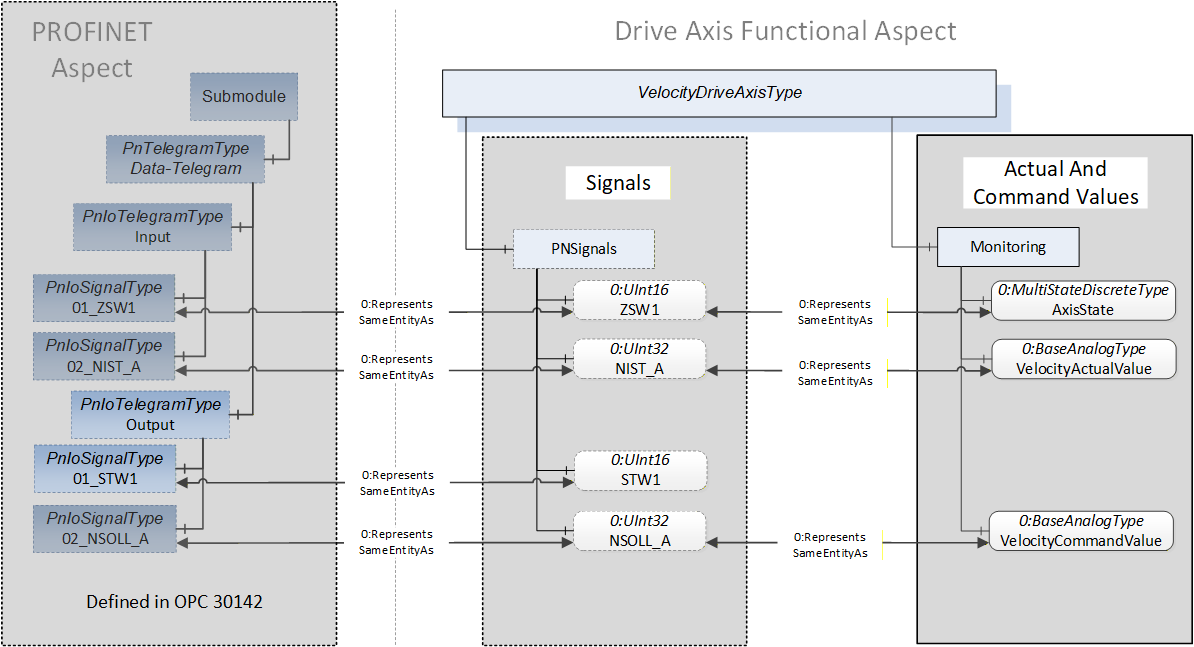
The "VelocityActualValue" and "VelocityCommandValue" 0:AnalogUnitType Variables in the "Actual and Command Values" sub-aspect contain the numeric representation of the "NIST_A" and "NSOLL_A" Standard Signals allowing Clients easy access to the numeric values of the represented Signals. The AxisState Variable contains the current state of the axis state machine, as it is encoded by related bits in value of the "ZSW1" Standard Signal. The AxisState Variable is encoded as 0:MultistateDiscreteType allowing Clients to obtain the state of the Axis/DO as numeric value as well as in string form. These Variables are linked to their Signal Variable counterpart in the "Signals" sub-aspect using 0:RepresentsSameEntityAs References (see Figure 11).
The "01_ZSW1", "02_NIST_A", "01_STW1" and "02_NSOLL_A" Signal Objects in the PROFINET aspect represent Standard Signals provided by the Axis Object. These Standard Signals are also linked to their counterpart Variables in the functional aspect of the Information Model using 0:RepresentsSameEntityAs References (see Figure 11).
The "ZSW1", "NIST_A", "STW1" and "NSOLL_A" Variables in the "Signals" sub-aspect provide the raw Signal Values encoded as unsigned integer data types.
6.2 PROFINET Drive Security
Servers shall allow Method invocation only for Sessions using user accounts with the right to invoke Methods. There shall exist user accounts with restricted rights (that is, no Method invocation unless explicitly allowed for all users for a specific Method) for Clients performing data acquisition or diagnosis also.
If well-known Roles are supported by the Server, role-based security (see [OPC 10000-18] shall be applied. Method invocation shall only be possible if the well-known "Operator" Role is granted to the Client's Session. This applies to all Methods except for those where the restriction is lifted explicitly.
All Variables are read-only. Modifying the content of Variables shall only be possible by invoking a "Set-" Method.
7 OPC UA ObjectTypes
Figure 12 shows the organization of the ObjectTypes used to model Axis Objects. All Axis ObjectTypes are derived from the abstract DriveAxisType providing the functions common to all Axis ObjectTypes.
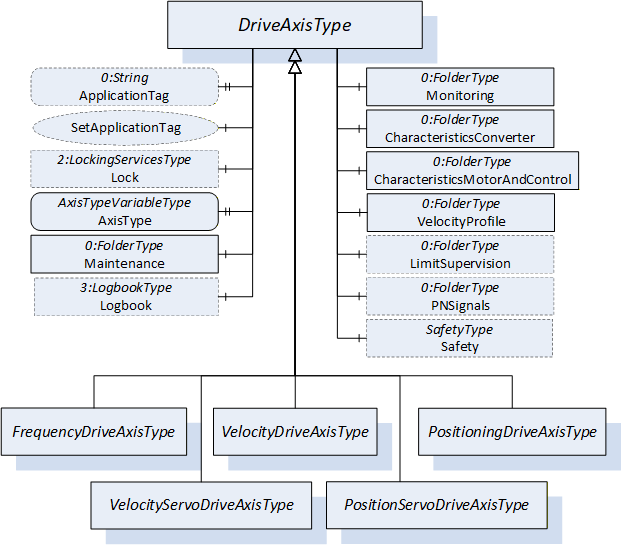
7.1 DriveAxisType
The DriveAxisType ObjectType contains the Variables and Properties common for all Axis Objects. This ObjectType is specified as abstract and cannot be used directly.
| Attribute | Value | ||||
| BrowseName | DriveAxisType | ||||
| IsAbstract | True | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of the 0:BaseObjectType defined in OPC 10000-5. | |||||
| 0:HasProperty | Variable | ApplicationTag | 0:String | 0:PropertyType | O, RO |
| 0:HasComponent | Method | SetApplicationTag | O | ||
| 0:HasComponent | Object | Lock | 2:LockingServicesType | O | |
| 0:HasProperty | Variable | AxisType | 0:Byte | AxisTypeVariableType | M, RO |
| 0:HasComponent | Object | Monitoring | 0:FolderType | M | |
| 0:HasComponent | Object | PNSignals | 0:FolderType | O | |
| 0:HasComponent | Object | LimitSupervision | 0:FolderType | O | |
| 0:HasComponent | Object | Safety | SafetyType | O | |
| 0:HasComponent | Object | CharacteristicsConverter | 0:FolderType | M | |
| 0:HasComponent | Object | CharacteristicsMotorAndControl | 0:FolderType | O | |
| 0:HasComponent | Object | VelocityProfile | 0:FolderType | M | |
| 0:HasComponent | Object | Maintenance | 0:FolderType | M | |
| 0:GeneratesEvent | ObjectType | DiagnosisAlarmType | |||
| 0:HasComponent | Object | Logbook | 3:LogbookType | O | |
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Measurement | |||||
| PDRV Diagnosis Events | |||||
| PDRV Signals |
General Properties
The ApplicationTag Variable contains information given by the overall application. The purpose is to provide additional semantic information about the represented Axis/DO role or labelling in the context of the specific overall application context (machine, site or plant). Therefore, plant operators and/or application engineers are responsible to set the content of the ApplicationTag with information used for site management, asset management or other administrative purposes, e.g. "Production Line <m>/Machine <n>/x-Axis". Furthermore, information like "tag-function" out of the PROFINET I&M-1 record or the "descriptor" out of the I&M-3 record may be used as content of the ApplicationTag Variable.
However, as a default, vendors might generate the ApplicationTag string out of the PROFINET device structure given by standard PROFINET configuration data as initial content of the Variable. The generic default string is "<NameOfStation>/Drive Axis Nr. <axis number>", where the <NameOfStation> is the NameOfStation of the PROFINET Drive device and the <axis number> is the PROFINET device module number representing the related PROFIdrive axis DO.
The Client can change the Value of this Variable by invoking the SetApplicationTag Method.
Before invoking a Method of the DriveAxisType Object, Clients must gain exclusive write access ("lock" the DriveAxisType Object) using the Lock Object.
The Lock Object ensures exclusive Method call for one Client. The Client locks the DriveAxisType Object by invoking the InitLock Method of the Lock Object. The Client invokes ExitLock to release the lock. The scope of the lock comprises all components of the DriveAxisType Object.
SetApplicationTag Method
This Method sets the Value of the ApplicationTag Variable. The security constraints defined in chapter 6.2 apply.
Signature
SetApplicationTag (
[in] 0:String ApplicationTag
);
| Argument | Description |
| ApplicationTag | String containing the desired content of the ApplicationTag Variable. |
The Method Result Codes (defined in Call Service) are defined in Table 15.
| Result Code | Description |
| Good | The Method execution was successful. |
| Bad_UserAccessDenied | The user has not the authorization to execute the Method. |
| Bad_InvalidArgument | The Server is not able to apply the name. The ApplicationTag string may be too long or may contain invalid characters. The Server may also reject duplicates. |
| Bad_Locked | The DriveAxisType Object is locked by a different Client's Session. |
| Bad_RequiresLock | The DriveAxisType Object is not locked. Clients must lock the DriveAxisType Object before invoking a Method. |
| Bad_UnexpectedError | The Server is not able to execute the function because an unexpected error occurred. The Device might be temporarily unavailable or unreachable due to network failure. |
The AxisType Property contains the mechanical drive type of the represented Axis/DO modelled as AxisTypeVariableType (see 9.1).
The Value shall be 0 (reference "LINEAR_MOTION") for linear axis drives and 1 (reference "ROTATORY_MOTION") for rotatory axis drives.
Some components of the DriveAxisType have additional subcomponents which are defined in Table 16. For detailed descriptions of the Variables see Table 33.
| BrowsePath | References | NodeClass | BrowseName | DataType | TypeDefinition | Others | ||
| PNSignals | 0:HasComponent | Variable | <SignalName> | 0:Number | 0:BaseDataVariableType | MP, RO | ||
| 0:HasProperty | Variable | SignalNumber | 0:UInt16 | 0:PropertyType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | AxisState | 0:UInt16 | 0:MultiStateDiscreteType | M, RO | ||
| Monitoring | 0:HasComponent | Variable | ControlPriority | 0:UInt16 | 0:MultiStateDiscreteType | M, RO | ||
| Monitoring | 0:HasComponent | Variable | ControlMode | 0:UInt16 | 0:MultiStateDiscreteType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | OutputCurrent | 0:Float | 0:AnalogUnitType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | Torque | 0:Float | 0:AnalogUnitType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | Force | 0:Float | 0:AnalogUnitType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | Power | 0:Float | 0:AnalogUnitType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | MotorTemperature | 0:Float | TemperatureVariableType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | ConverterTemperature | 0:Float | TemperatureVariableType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | DeviceTemperature | 0:Float | TemperatureVariableType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | FeedbackSensor1Temperature | 0:Float | TemperatureVariableType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | FeedbackSensor2Temperature | 0:Float | TemperatureVariableType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | FeedbackSensor3Temperature | 0:Float | TemperatureVariableType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | BrakeResistorTemperature | 0:Float | TemperatureVariableType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | DcBusVoltage | 0:UInt16 | 0:AnalogUnitType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | PositionFollowingError | 0:Float | 0:AnalogUnitType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | VelocityFollowingError | 0:Float | 0:AnalogUnitType | O, RO | ||
| Monitoring | 0:HasComponent | Variable | BrakeStatus | 0:Byte | 0:MultiStateDiscreteType | O, RO | ||
| Applied from 2:IOperationCounterType Interface: | ||||||||
| Maintenance | 0:HasProperty | Variable | 2:PowerOnDuration | 0:Duration | 0:PropertyType | O, RO | ||
| Maintenance | 0:HasProperty | Variable | 2:OperationDuration | 0:Duration | 0:PropertyType | O, RO | ||
| Maintenance | 0:HasProperty | Variable | 2:OperationCycleCounter | 0:UInteger | 0:PropertyType | O, RO | ||
| Maintenance | 0:HasComponent | Variable | MotorCapacityUtilization | 0:UInt16 | 0:BaseDataVariableType | O, RO | ||
| Maintenance | 0:HasComponent | Variable | ConverterCapacityUtilization | 0:UInt16 | 0:BaseDataVariableType | O, RO | ||
| CharacteristicsConverter | 0:HasComponent | Variable | InputConverterAcInputVoltage | 0:UInt16 | 0:AnalogUnitType | O, RO | ||
| CharacteristicsConverter | 0:HasComponent | Variable | OutputConverterPulseFrequency | 0:UInt16 | 0:AnalogUnitType | M, RO | ||
| CharacteristicsConverter | 0:HasComponent | Variable | IntermediateCircuitVoltageConfigured | 0:UInt16 | 0:AnalogUnitType | O, RO | ||
| CharacteristicsConverter | 0:HasComponent | Variable | ConverterThermalLoadLimitConfigured | 0:Float | 0:AnalogUnitType | O, RO | ||
| CharacteristicsConverter | 0:HasComponent | Variable | ConverterExcessCurrentConfigured | 0:Float | 0:AnalogUnitType | O, RO | ||
| CharacteristicsConverter | 0:HasComponent | Variable | BrakeResistorExcessCurrentLimit | 0:Float | 0:AnalogUnitType | O, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | PowerRated | 0:Float | 0:AnalogUnitType | M, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | SpeedRated | 0:Float | 0:AnalogUnitType | O, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | TorqueRated | 0:Float | 0:AnalogUnitType | O, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | ForceRated | 0:Float | 0:AnalogUnitType | O, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | MaxCurrent | 0:Float | 0:AnalogUnitType | O, RO | ||
| CharacteristicsMotorAndControl | 0:HasProperty | Variable | UfRatio | 0:Float | 0:PropertyType | O, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | RunUpVoltage | 0:Float | 0:AnalogUnitType | O, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | DcBrakingCurrent | 0:Float | 0:AnalogUnitType | O, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | DcBrakingTime | 0:UInt16 | 0:AnalogUnitType | O, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | FeedbackMode | 0:UInt16 | 0:MultiStateDiscreteType | O, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | SpeedMaxConfigured | 0:Float | 0:AnalogUnitType | O, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | TorqueMaxConfigured | 0:Float | 0:AnalogUnitType | O, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | MotorThermalLoadLimitConfigured | 0:Float | 0:AnalogUnitType | O, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | MotorExcessCurrentConfigured | 0:Float | 0:AnalogUnitType | O, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | MotorType | 0:Byte | 0:MultiStateDiscreteType | M, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | PositionFollowingErrorLimit | 0:Float | 0:AnalogUnitType | O, RO | ||
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | VelocityFollowingErrorLimit | 0:Float | 0:AnalogUnitType | O, RO | ||
| VelocityProfile | 0:HasComponent | Variable | RfgRampDownTime | 0:Float | 0:BaseAnalogType | M, RO | ||
| VelocityProfile | 0:HasComponent | Variable | QuickStopRampDownTime | 0:Float | 0:BaseAnalogType | M, RO | ||
| VelocityProfile | 0:HasComponent | Variable | NominalSpeed | 0:Float | 0:BaseAnalogType | M, RO | ||
| VelocityProfile | 0:HasComponent | Variable | RampDeceleration | 0:Float | 0:AnalogUnitType | M, RO | ||
| VelocityProfile | 0:HasComponent | Variable | QuickStopRampDeceleration | 0:Float | 0:AnalogUnitType | M, RO | ||
The child Nodes of the DriveAxisType have additional Attribute values defined in Table 17.
| BrowsePath | Value Attribute | |||
| S1_SWITCHING_ON_INHIBITED S2_READY_FOR_SWITCHING_ON S3_SWITCHED_ON S4_OPERATION S51_RAMP_STOP S52_QUICK_STOP S41_POS_BASIC_STATE S42_POS_JOGGING S43_POS_BRAKING_WITH_RAMP S44_POS_HOMING_PROCEDURE S451_POS_TRAVERSING_TASK_ACTIVE S452_POS_BRAKING_WITH_RAMP S453_POS_INTERMEDIATE_STOP | |||
| NONE PROFIBUS_PRIORITY PROFIBUS_CONTROL PROFINET_PRIORITY PROFINET_CONTROL LOCAL_CONTROL SETUP_TOOL_CONTROL | |||
| TORQUE_CONTROL FORCE_CONTROL SPEED_CONTROL SPEED_CONTROL_DSC POSITION_CONTROL | |||
| FEEDBACK_SENSOR_1 FEEDBACK_SENSOR_2 FEEDBACK_SENSOR_3 SENSORLESS | |||
| PM_SYNCHRONOUS_ROTARY PM_SYNCHRONOUS_LINEAR STEPPER_ROTARY STEPPER_LINEAR INDUCTION_ROTATORY INDUCTION_LINEAR HYDRAULIC_MOTOR_ROTARY HYDRAULIC_CYLINDER_LINEAR PNEUMATIC_MOTOR_ROTARY PNEUMATIC_CYLINDER_LINEAR |
PNSignals folder in Signals sub-aspect
The PNSignals folder contains Signal Variables representing the Signals as defined in [PI 3172 PDP], chapter 6.3.4.2, Table 86. The supported Standard Signals are determined by the configured Standard Telegram modular telegram configuration and may also be freely configured (see [PI 3172 PDP], chapter 6.3.4.4). The Axis/DO IO Data configuration may also contain profile- or vendor-specific Signals with signal No. 100 and greater.
The Server shall provide as many <SignalName> Variables as are needed to represent the configured Signals. The placeholder template string shall be replaced with the Signal's abbreviation as specified in [PI 3172 PDP], Table 86. For profile- and vendor specific Signals the abbreviations specified by the profile or vendor apply. For vendor specific Signals, the SignalNumber Property shall always be provided for the representing Signal Variable.
The DataType provided for the Signal Variables shall be provided according to the length of the Signal as specified in [PI 3172 PDP], chapter 6.3.4.2, Table 86: For 16-bit Signals, the DataType shall be 0:UInt16. For 32-bit Signals, the DataType shall be 0:UInt32. For Signals with sign, the corresponding signed DataTypes 0:Int16 and 0:Int32 shall be provided.
Monitoring folder in Actual and Command Values sub-aspect
The Monitoring folder contains Monitoring Variables describing measurements of the Axis/DO which are of interest for monitoring (see derived Axis/DO ObjectTypes and Table 33) encoded as numeric data type. If the corresponding Standard Signal is configured and its representation is provided in the PNSignals folder, the Monitoring Variable shall be linked to the Signal Variable using a 0:RepresentsSameEntityAs ReferenceType.
Figure 13 Shows the possible components of the "Monitoring" folder common for all derived Axis Object types, as described in Table 16.
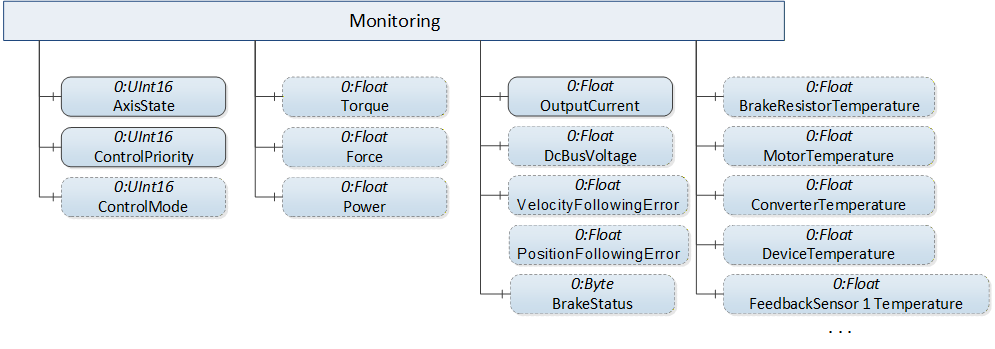
The AxisState Variable contains the actual state of the Axis/DO internal state machine modelled as 0:MultiStateDiscreteType defined in [OPC 10000-8].
The ControlPriority Variable contains the leading control context (PROFIBUS, PROFINET, setup tool, …) of the Axis/DO also modelled as 0:MultiStateDiscreteType.
The ControlMode Variable contains the currently active control function in the overall control cascade modelled as 0:MultiStateDiscreteType.
The content of the EnumStrings lookup table Property is defined in Table 17 for all these 0:MultiStateDiscreteType Variables. The "Locale" field of the 0:LocalizedText structures is Server specific.
For a description of all Variables and Properties in the "Monitoring" folder see Table 33.
Maintenance folder in Axis Properties sub-aspect
The Maintenance folder contains optional properties defined by the 2:IOperationCounterType Interface specified in [OPC 10000-100] as well as parameters yielding capacity related information. Figure 14 shows the possible components of the "Maintenance" folder common for all derived Axis Object types, as described in Table 16.
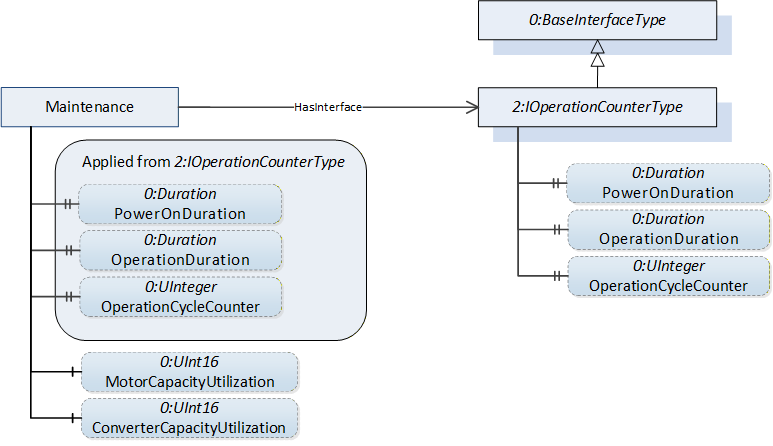
For a description of the Variables and Properties in the "Maintenance" folder see Table 33.
LimitSupervision folder in Axis Properties sub-aspect
The LimitSupervision folder contains Variables with Values describing limit values for motor current, torque, and the like. These limit Variables differ between concrete derived Axis ObjectTypes and are specified separately for each derived Axis ObjectType.
For a description of the Variables in the "LimitSupervision" folder see Table 33.
CharacteristicsConverter folder in Axis Properties sub-aspect
The CharacteristicsConverter folder contains Variables with Values describing key data of the Drive's converter. Figure 15 shows the possible components of the "CharacteristicsConverter" folder common for all derived Axis Object types, as described in Table 16.
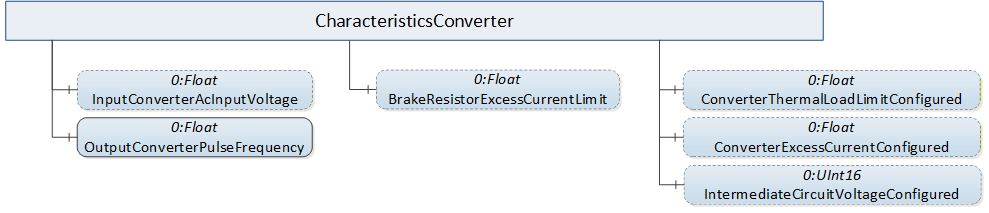
For a description of the Variables in the "CharacteristicsConverter" folder see Table 33.
CharacteristicsMotorAndControl folder in Axis Properties sub-aspect
The CharacteristicsMotorAndControl folder contains Variables with Values describing key data of the Drive's motor and its key control features. Figure 16 shows the possible components of the "CharacteristicsMotorAndControl" folder common for all derived Axis Object types, as described in Table 16.
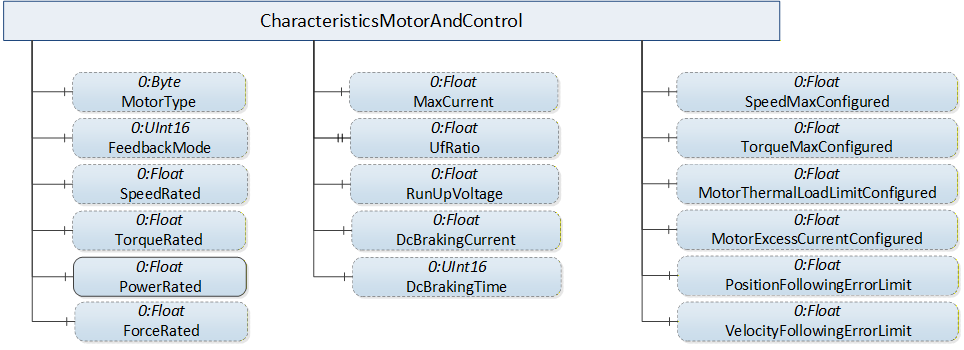
The FeedbackMode Variable shall contain the Value "FEEDBACK_SENSOR_1" if only one sensing device is present, which is the motor sensor in this case.
For a description of the Variables in the "CharacteristicsMotorAndControl" folder see Table 33.
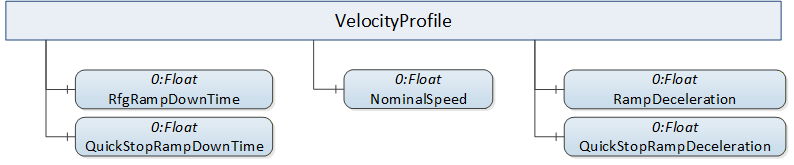
VelocityProfile folder in Axis Properties sub-aspect
The VelocityProfile folder contains Variables describing key properties of brake ramps. The folder contains the properties mandatory for each derived Axis Object types. Figure 17 shows the components of the "VelocityProfile" folder common for all derived Axis Object types, as described in Table 16.
Diagnosis sub-aspect
The 3:LogbookType Object defined in [OPC 30143 ENC] provides Methods for accessing the Drive's fault buffer (see [PI 3172 PDP] Fault Buffer Mechanism). These Methods can be used by Clients to obtain the active diagnosis entries (that is, get all fault entries without "Event going" timestamp) or apply custom filter criteria (see [OPC 30143 ENC] chapter 7.5 LogbookType for details). In conjunction with establishing a Subscription for one of the supported EventTypes of the 3:LogbookType Object Clients can synchronize themselves with the current diagnosis status and will receive Notifications for each change of the diagnosis status subsequently, such as coming, going and the like. The possible values for the EventCode are defined in [PI 3172 PDP], see Table 57.
The Server might provide DiagnosisAlarmType Events and / or 3:LogbookEventType Events.
Safety Object in Actual and Command Values sub-aspect
The optional SafetyType Object has SafetyFunctionType Object components describing safety functions. For each available safety function, basic settings regarding selection and activation status are provided (see 7.8 and 7.9).
7.2 VelocityDriveAxisType
The VelocityDriveAxisType is an DriveAxisType with a speed command interface. Figure 18 shows a block diagram demonstrating the basic organization and control flow for this axis type. If the Drive is a PROFIdrive the VelocityDriveAxisType is used to represent AC1 Drive Objects using a speed command interface.
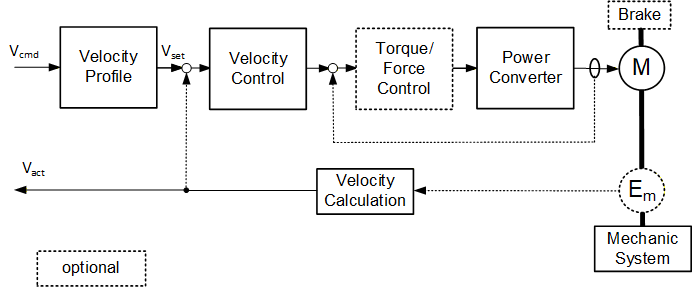
Figure 19 shows the components added by the VelocityDriveAxisType ObjectType to the DriveAxisType it is derived from.
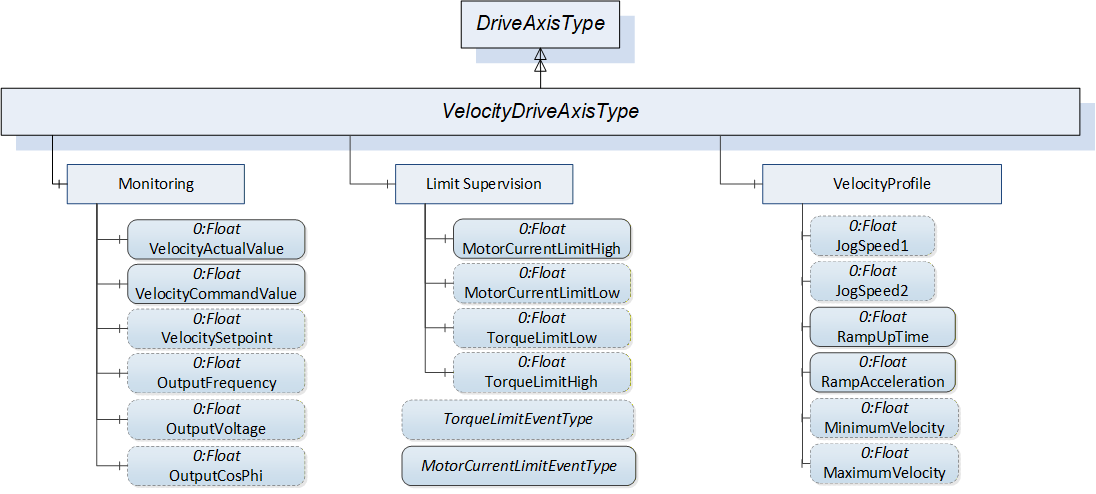
The formal definition of the VelocityDriveAxisType ObjectType can be found in Table 18.
| Attribute | Value | ||||
| BrowseName | VelocityDriveAxisType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of the DriveAxisType. | |||||
| 0:GeneratesEvent | ObjectType | TorqueLimitEventType | |||
| 0:GeneratesEvent | ObjectType | MotorCurrentLimitEventType | |||
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Measurement | |||||
The components of the VelocityDriveAxisType have additional subcomponents which are defined in Table 19.
| BrowsePath | References | NodeClass | BrowseName | DataType | TypeDefinition | Others |
| Monitoring | 0:HasComponent | Variable | VelocitySetpoint | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | VelocityCommandValue | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | VelocityActualValue | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | OutputFrequency | 0:Float | 0:AnalogUnitType | O, RO |
| Monitoring | 0:HasComponent | Variable | OutputVoltage | 0:Float | 0:AnalogUnitType | O, RO |
| Monitoring | 0:HasComponent | Variable | OutputCosPhi | 0:Float | 0:BaseAnalogType | O, RO |
| LimitSupervision | 0:HasComponent | Variable | MotorCurrentLimitHigh | 0:Float | 0:AnalogUnitType | O, RO |
| LimitSupervision | 0:HasComponent | Variable | MotorCurrentLimitLow | 0:Float | 0:AnalogUnitType | O, RO |
| LimitSupervision | 0:HasComponent | Variable | TorqueLimitLow | 0:Float | 0:AnalogUnitType | O, RO |
| LimitSupervision | 0:HasComponent | Variable | TorqueLimitHigh | 0:Float | 0:AnalogUnitType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | JogSpeed1 | 0:Float | 0:AnalogUnitType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | JogSpeed2 | 0:Float | 0:AnalogUnitType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | RfgRampUpTime | 0:Float | 0:BaseAnalogType | M, RO |
| VelocityProfile | 0:HasComponent | Variable | RfgAcceleration | 0:Float | 0:AnalogUnitType | M, RO |
| VelocityProfile | 0:HasComponent | Variable | MinimumVelocity | 0:Float | 0:AnalogUnitType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | MaximumVelocity | 0:Float | 0:AnalogUnitType | O, RO |
7.3 FrequencyDriveAxisType
A FrequencyDriveAxisType is a DriveAxisType with a frequency command interface. Figure 20 shows a block diagram demonstrating the basic organization and control flow for this axis type. If the Drive is a PROFIdrive, the FrequencyDriveAxisType is used to represent AC1 Drive Objects using a frequency command interface.
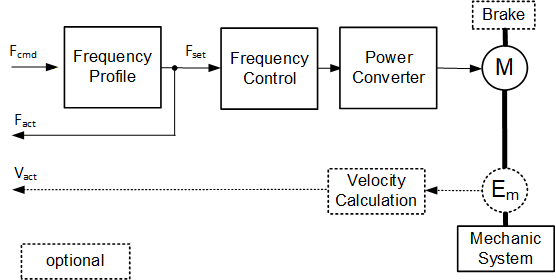
Figure 21 shows the components added by the FrequencyDriveAxisType ObjectType to the DriveAxisType it is derived from.
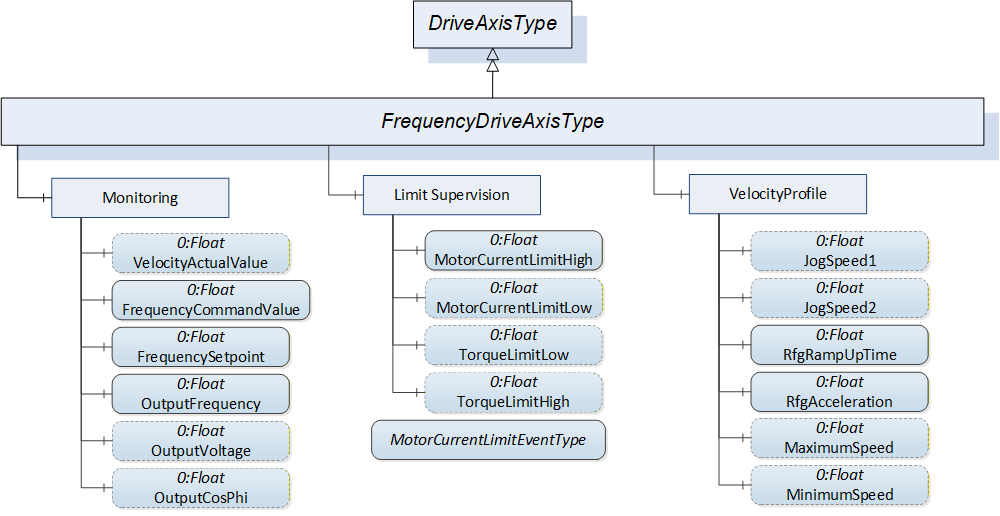
The formal definition of the FrequencyDriveAxisType ObjectType can be found in Table 20.
| Attribute | Value | ||||
| BrowseName | FrequencyDriveAxisType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of the DriveAxisType. | |||||
| 0:GeneratesEvent | ObjectType | MotorCurrentLimitEventType | |||
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Measurement | |||||
The components of the FrequencyDriveAxisType have additional subcomponents which are defined in Table 21.
| BrowsePath | References | NodeClass | BrowseName | DataType | TypeDefinition | Others |
| Monitoring | 0:HasComponent | Variable | FrequencyCommandValue | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | VelocityActualValue | 0:Float | 0:AnalogUnitType | O, RO |
| Monitoring | 0:HasComponent | Variable | FrequencySetpoint | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | OutputFrequency | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | OutputVoltage | 0:Float | 0:AnalogUnitType | O, RO |
| Monitoring | 0:HasComponent | Variable | OutputCosPhi | 0:Float | 0:BaseAnalogType | O, RO |
| LimitSupervision | 0:HasComponent | Variable | MotorCurrentLimitHigh | 0:Float | 0:AnalogUnitType | M, RO |
| LimitSupervision | 0:HasComponent | Variable | MotorCurrentLimitLow | 0:Float | 0:AnalogUnitType | O, RO |
| LimitSupervision | 0:HasComponent | Variable | TorqueLimitLow | 0:Float | 0:AnalogUnitType | O, RO |
| LimitSupervision | 0:HasComponent | Variable | TorqueLimitHigh | 0:Float | 0:AnalogUnitType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | JogSpeed1 | 0:Float | 0:AnalogUnitType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | JogSpeed2 | 0:Float | 0:AnalogUnitType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | RfgRampUpTime | 0:Float | 0:AnalogUnitType | M, RO |
| VelocityProfile | 0:HasComponent | Variable | RfgAcceleration | 0:Float | 0:AnalogUnitType | M, RO |
| VelocityProfile | 0:HasComponent | Variable | MinimumVelocity | 0:Float | 0:AnalogUnitType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | MaximumVelocity | 0:Float | 0:AnalogUnitType | O, RO |
7.4 PositioningDriveAxisType
A PositioningDriveAxisType is an DriveAxisType with a motion trajectory command interface. Figure 22 shows a block diagram demonstrating the basic organization and control flow for this axis type. If the Drive is a PROFIdrive the PositioningDriveAxisType is used to represent AC3 Drive Objects using a motion trajectory command interface (program submode or MDI submode).
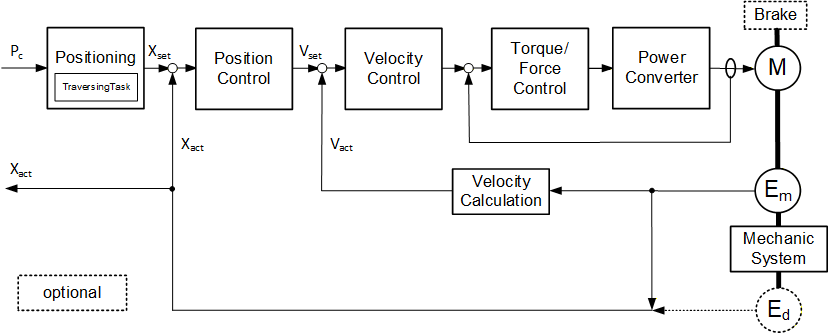
Figure 23 shows the components added by the PositioningDriveAxisType ObjectType to the DriveAxisType it is derived from.
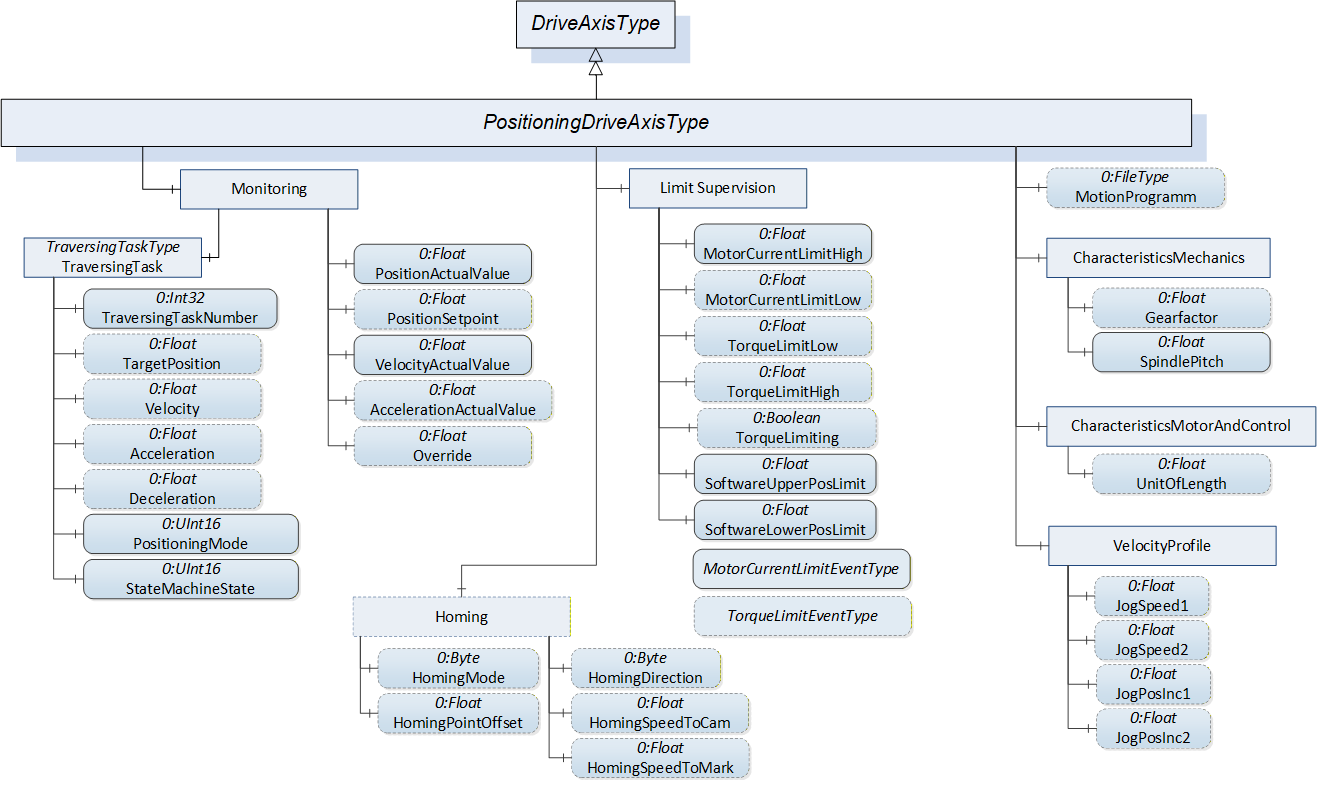
The formal definition of the PositioningDriveAxisType ObjectType can be found in Table 22.
| Attribute | Value | ||||
| BrowseName | PositioningDriveAxisType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of the DriveAxisType. | |||||
| 0:HasComponent | Object | Homing | 0:FolderType | O | |
| 0:HasComponent | Object | CharacteristicsMechanics | 0:FolderType | M | |
| 0:HasComponent | Object | LimitSupervision | 0:FolderType | M | |
| 0:HasComponent | Object | MotionProgram | 0:FileType | O | |
| 0:GeneratesEvent | ObjectType | TorqueLimitEventType | |||
| 0:GeneratesEvent | ObjectType | MotorCurrentLimitEventType | |||
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Measurement | |||||
Some components of the PositioningDriveAxisType have additional subcomponents which are defined in Table 23.
| BrowsePath | References | NodeClass | BrowseName | DataType | TypeDefinition | Others |
| Monitoring | 0:HasComponent | Variable | PositionActualValue | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | PositionSetpoint | 0:Float | 0:AnalogUnitType | O, RO |
| Monitoring | 0:HasComponent | Variable | VelocityActualValue | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | AccelerationActualValue | 0:Float | 0:AnalogUnitType | O, RO |
| Monitoring | 0:HasComponent | Object | TraversingTask | TraversingTaskType | M | |
| Monitoring | 0:HasComponent | Variable | Override | 0:Float | 0:BaseDataVariableType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | JogSpeed1 | 0:Float | 0:AnalogUnitType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | JogSpeed2 | 0:Float | 0:AnalogUnitType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | JogPosInc1 | 0:Float | 0:AnalogUnitType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | JogPosInc2 | 0:Float | 0:AnalogUnitType | O, RO |
| LimitSupervision | 0:HasComponent | Variable | MotorCurrentLimitHigh | 0:Float | 0:AnalogUnitType | M, RO |
| LimitSupervision | 0:HasComponent | Variable | MotorCurrentLimitLow | 0:Float | 0:AnalogUnitType | O, RO |
| LimitSupervision | 0:HasComponent | Variable | TorqueLimitLow | 0:Float | 0:AnalogUnitType | O, RO |
| LimitSupervision | 0:HasComponent | Variable | TorqueLimitHigh | 0:Float | 0:AnalogUnitType | O, RO |
| LimitSupervision | 0:HasComponent | Variable | SoftwareUpperPosLimit | 0:Float | 0:AnalogUnitType | M, RO |
| LimitSupervision | 0:HasComponent | Variable | SoftwareLowerPosLimit | 0:Float | 0:AnalogUnitType | M, RO |
| LimitSupervision | 0:HasComponent | Variable | TorqueLimiting | 0:Boolean | 0:BaseDataVariableType | O, RO |
| CharacteristicsMechanics | 0:HasComponent | Variable | Gearfactor | 0:Float | 0:AnalogUnitType | O, RO |
| CharacteristicsMechanics | 0:HasComponent | Variable | SpindlePitch | 0:Float | 0:AnalogUnitType | O, RO |
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | UnitOfLength | 0:Float | 0:AnalogUnitType | O, RO |
| Homing | 0:HasComponent | Variable | HomingDirection | 0:Byte | HomingDirectionType | O, RO |
| Homing | 0:HasComponent | Variable | HomingSpeedToCam | 0:Float | 0:AnalogUnitType | O, RO |
| Homing | 0:HasComponent | Variable | HomingSpeedToMark | 0:Float | 0:AnalogUnitType | O, RO |
| Homing | 0:HasComponent | Variable | HomingPointOffset | 0:Float | 0:AnalogUnitType | O, RO |
| Homing | 0:HasComponent | Variable | HomingMode | 0:Byte | HomingModeType | O, RO |
7.5 VelocityServoDriveAxisType
A VelocityServoDriveAxisType is an DriveAxisType with a velocity command interface. Figure 24 shows a block diagram demonstrating the basic organization and control flow for this axis type. If the Drive is a PROFIdrive, the VelocityServoDriveAxisType is used to represent AC4 Drive Objects using a speed command interface.
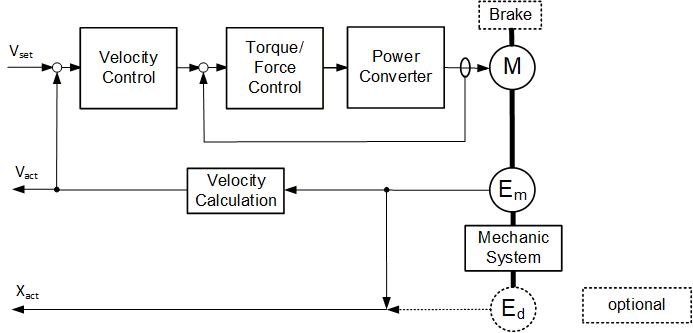
Figure 25 shows the components added by the VelocityServoDriveAxisType ObjectType to the DriveAxisType it is derived from.
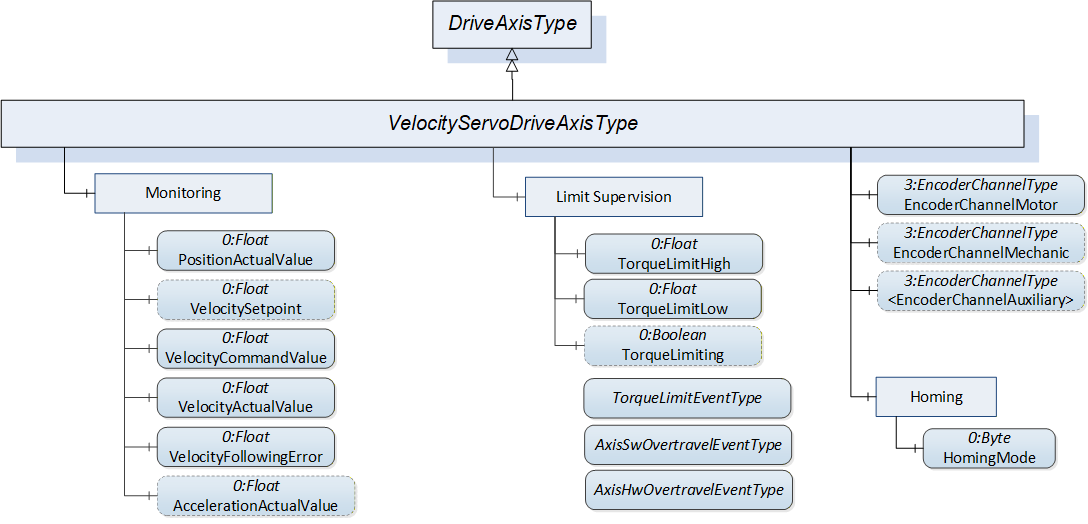
The formal definition of the VelocityServoDriveAxisType ObjectType can be found in Table 24.
| Attribute | Value | ||||
| BrowseName | VelocityServoDriveAxisType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of the DriveAxisType. | |||||
| 0:HasComponent | Object | EncoderChannelMotor | 3:EncoderChannelType | M | |
| 0:HasComponent | Object | EncoderChannelMechanic | 3:EncoderChannelType | O | |
| 0:HasComponent | Object | <EncoderChannelAuxiliary> | 3:EncoderChannelType | OP | |
| 0:HasComponent | Object | Homing | 0:FolderType | M | |
| 0:GeneratesEvent | ObjectType | AxisSwOvertravelEventType | |||
| 0:GeneratesEvent | ObjectType | AxisHwOvertravelEventType | |||
| 0:GeneratesEvent | ObjectType | TorqueLimitEventType | |||
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Measurement | |||||
Some components of the VelocityServoDriveAxisType have additional subcomponents which are defined in Table 25.
| BrowsePath | References | NodeClass | BrowseName | DataType | TypeDefinition | Others |
| Monitoring | 0:HasComponent | Variable | VelocitySetpoint | 0:Float | 0:AnalogUnitType | O, RO |
| Monitoring | 0:HasComponent | Variable | VelocityCommandValue | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | VelocityActualValue | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | AccelerationActualValue | 0:Float | 0:AnalogUnitType | O, RO |
| Homing | 0:HasComponent | Variable | HomingMode | 0:Byte | HomingModeType | M, RO |
| LimitSupervision | 0:HasComponent | Variable | TorqueLimitHigh | 0:Float | 0:AnalogUnitType | M, RO |
| LimitSupervision | 0:HasComponent | Variable | TorqueLimitLow | 0:Float | 0:AnalogUnitType | M, RO |
| LimitSupervision | 0:HasComponent | Variable | TorqueLimiting | 0:Boolean | 0:BaseDataVariableType | O, RO |
7.6 PositionServoDriveAxisType
A PositionServoDriveAxisType is an DriveAxisType with a position command interface. Figure 26 shows a block diagram demonstrating the basic organization and control flow for this axis type. If the Drive is a PROFIdrive the PositionServoDriveAxisType is used to represent AC5 Drive Objects.
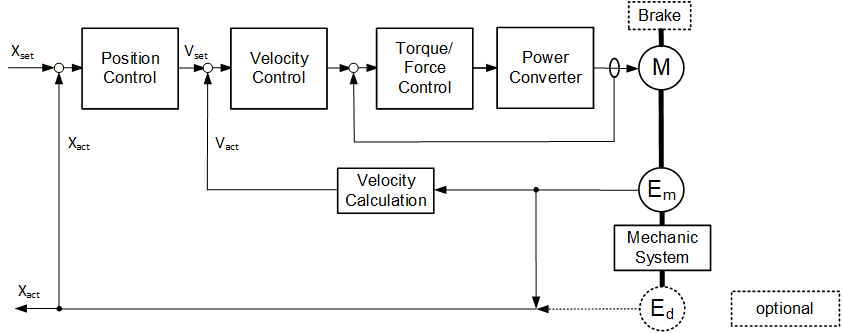
Figure 27 shows the components added by the PositionServoDriveAxisType ObjectType to the DriveAxisType it is derived from.
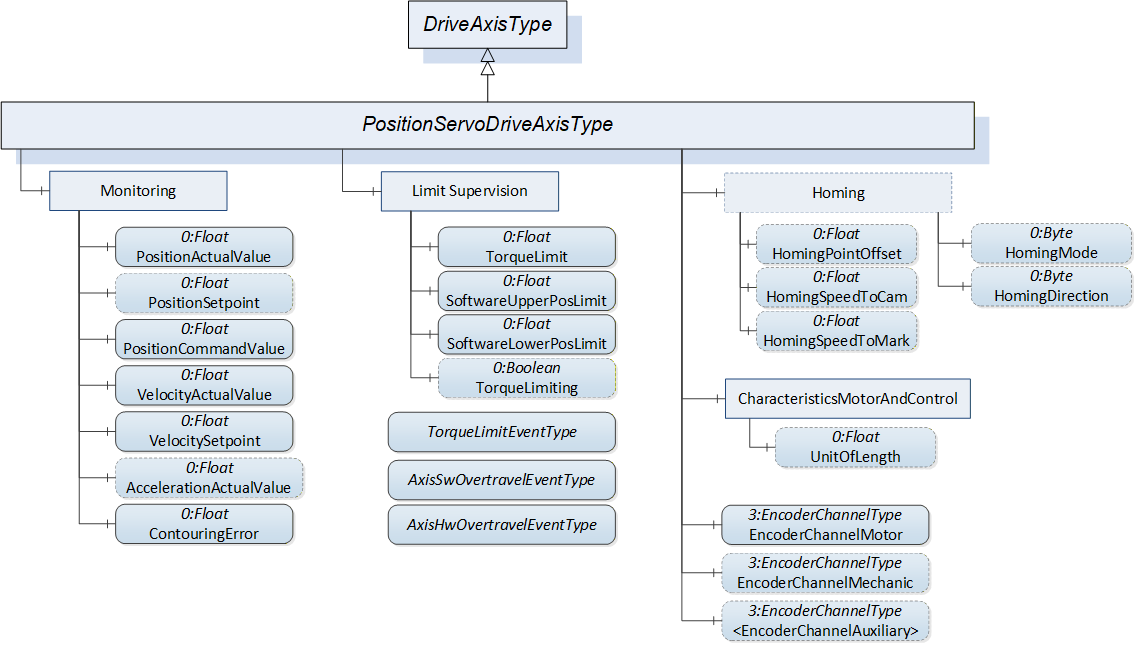
The formal definition of the PositionServoDriveAxisType ObjectType can be found in Table 26.
| Attribute | Value | ||||
| BrowseName | PositionServoDriveAxisType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of the DriveAxisType. | |||||
| 0:HasComponent | Object | EncoderChannelMotor | 3:EncoderChannelType | M | |
| 0:HasComponent | Object | EncoderChannelMechanic | 3:EncoderChannelType | O | |
| 0:HasComponent | Object | <EncoderChannelAuxiliary> | 3:EncoderChannelType | OP | |
| 0:HasComponent | Object | Homing | 0:FolderType | O | |
| 0:GeneratesEvent | ObjectType | AxisSwOvertravelEventType | |||
| 0:GeneratesEvent | ObjectType | AxisHwOvertravelEventType | |||
| 0:GeneratesEvent | ObjectType | TorqueLimitEventType | |||
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Measurement | |||||
Some components of the PositionServoDriveAxisType have additional subcomponents which are defined in Table 27.
| BrowsePath | References | NodeClass | BrowseName | DataType | TypeDefinition | Others |
| Monitoring | 0:HasComponent | Variable | PositionCommandValue | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | VelocitySetpoint | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | PositionActualValue | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | VelocityActualValue | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | PositionSetpoint | 0:Float | 0:AnalogUnitType | O, RO |
| Monitoring | 0:HasComponent | Variable | AccelerationActualValue | 0:Float | 0:AnalogUnitType | O, RO |
| Monitoring | 0:HasComponent | Variable | ContouringError | 0:Float | 0:AnalogUnitType | M, RO |
| LimitSupervision | 0:HasComponent | Variable | TorqueLimit | 0:Float | 0:AnalogUnitType | M, RO |
| LimitSupervision | 0:HasComponent | Variable | SoftwareUpperPosLimit | 0:Float | 0:AnalogUnitType | M, RO |
| LimitSupervision | 0:HasComponent | Variable | SoftwareLowerPosLimit | 0:Float | 0:AnalogUnitType | M, RO |
| LimitSupervision | 0:HasComponent | Variable | TorqueLimiting | 0:Boolean | 0:BaseDataVariableType | O, RO |
| CharacteristicsMotorAndControl | 0:HasComponent | Variable | UnitOfLength | 0:Float | 0:AnalogUnitType | O, RO |
| Homing | 0:HasComponent | Variable | HomingDirection | 0:Byte | HomingDirectionType | O, RO |
| Homing | 0:HasComponent | Variable | HomingSpeedToCam | 0:Float | 0:AnalogUnitType | O, RO |
| Homing | 0:HasComponent | Variable | HomingSpeedToMark | 0:Float | 0:AnalogUnitType | O, RO |
| Homing | 0:HasComponent | Variable | HomingPointOffset | 0:Float | 0:AnalogUnitType | O, RO |
| Homing | 0:HasComponent | Variable | HomingMode | 0:Byte | HomingModeType | O, RO |
7.7 TraversingTaskType
The TraversingTaskType represents a traversing task.
| Attribute | Value | ||||
| BrowseName | TraversingTaskType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of the 0:BaseObjectType defined in [OPC 10000-5]. | |||||
| 0:HasComponent | Variable | TraversingTaskNumber | 0:Int32 | 0:BaseDataVariableType | M, RO |
| 0:HasComponent | Variable | TargetPosition | 0:Float | 0:AnalogUnitType | O, RO |
| 0:HasComponent | Variable | Velocity | 0:Float | 0:AnalogUnitType | O, RO |
| 0:HasComponent | Variable | Acceleration | 0:Float | 0:AnalogUnitType | O, RO |
| 0:HasComponent | Variable | Deceleration | 0:Float | 0:AnalogUnitType | O, RO |
| 0:HasComponent | Variable | PositioningMode | 0:UInt16 | 0:MultiStateDiscreteType | M, RO |
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Measurement | |||||
The TraversingTaskNumber Variable contains the number of the traversing task currently executed. Interpretation of TraversingTaskNumber:
| TraversingTaskNumber Value | Traversing task executed |
| -5 | Jogging positive (S42) |
| -4 | Jogging negative (S42) |
| -3 | Homing procedure (S44) |
| -2 | MDI sub-mode active |
| -1 | No traversing task is executed: stand still (S41) |
| >=0 | Number of traversing task (0 - 1023) |
If no traversing task is executed (TraversingTaskNumber == -1), the Value of all other Variables shall be 0. If a traversing task is executed (TraversingTaskNumber >=0), the AxisState Variable contains one of the values belonging to the S45 sub state machine (see [PI 3172 PDP], Figure 35 also).
The TargetPosition Variable contains the target position for the traversing task generator.
The Velocity Variable contains the desired speed for the traversing task generator.
The Acceleration Variable contains the desired acceleration for the traversing task generator.
The PositioningMode Variable contains the information if the TargetPosition Variable has to be interpreted as absolute or relative position encoded as 0:MultiStateDiscreteType defined in [OPC 10000-8]. The StateMachineState Variable contains the state of the positioning mode substate machine also encoded as 0:MultiStateDiscreteType. The content of their EnumStrings lookup table Properties is defined in Table 29.
| BrowsePath | Value Attribute | ||
| INACTIVE RELATIVE_POSITIONING ABSOLUTE_SHORTEST_PATH_MODULO_DIRECTION _POSITIONING ABSOLUTE_POSITIVE_MODULO_DIRECTION _POSITIONING ABSOLUTE_NEGATIVE_ MODULO_DIRECTION _POSITIONING |
The following table contains descriptions of the semantic for all possible Values of the PositioningMode Variable.
| Element Value | Description |
| INACTIVE | No traversing task is active. |
| RELATIVE_POSITIONING | Relative Positioning. |
| ABSOLUTE_SHORTEST_PATH_MODULO_DIRECTION _POSITIONING | The absolute position shall be reached by the shortest path. |
| ABSOLUTE_POSITIVE_MODULO_DIRECTION _POSITIONING | The absolute position shall be reached by a motion in positive direction. |
| ABSOLUTE_NEGATIVE_ MODULO_DIRECTION _POSITIONING | The absolute position shall be reached by a motion in negative direction. |
7.8 SafetyType
The SafetyType contains SafetyFunctionType Variables describing basic settings for safety functions.
| Attribute | Value | ||||
| BrowseName | SafetyType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of the 0:BaseObjectType defined in [OPC 10000-5]. | |||||
| 0:HasComponent | Object | STO | SafetyFunctionType | M | |
| 0:HasComponent | Object | SS1 | SafetyFunctionType | O | |
| 0:HasComponent | Object | SS2 | SafetyFunctionType | O | |
| 0:HasComponent | Object | SOS | SafetyFunctionType | O | |
| 0:HasComponent | Object | SLS | SafetyFunctionType | O | |
| 0:HasComponent | Object | SDI | SafetyFunctionType | O | |
| 0:HasComponent | Object | SLA | SafetyFunctionType | O | |
| 0:HasComponent | Object | SLP | SafetyFunctionType | O | |
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Measurement | |||||
The STO Object represents the status of the "Safe torque off" safety function.
The SS1 Object represents the status of the "Safe stop 1" safety function.
The SS2 Object represents the status of the "Safe stop 2" safety function.
The SOS Object represents the status of the "Safe operating stop" safety function.
The SLS Object represents the status of the "Safely limited speed" safety function.
The SDI Object represents the status of the "Safe direction" safety function.
The SLA Object represents the status of the "Safely limited acceleration" safety function.
The SLP Object represents the status of the "Safely limited position" safety function.
If a specific safety function is supported by the Axis/DO, the representing SafetyFunctionType Object shall be provided.
7.9 SafetyFunctionType
The SafetyFunctionType represents the status of one safety function.
| Attribute | Value | ||||
| BrowseName | SafetyFunctionType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of the 0:BaseObjectType defined in [OPC 10000-5]. | |||||
| 0:HasComponent | Variable | SelectionState | 0:UInt16 | 0:MultiStateDiscreteType | M |
| 0:HasComponent | Variable | ActivationState | 0:UInt16 | 0:MultiStateDiscreteType | M |
| 0:HasProperty | Variable | Limit | 0:Float | 0:PropertyType | O |
The SelectionState Variable represents the selection status of the represented safety function.
The ActivationState Variable represents the activation status of the represented safety function.
The Limit Variable represents the speed limit if representing the SLS safety function or the acceleration limit if representing the SLA safety function. Shall only be provided for these two safety functions.
| BrowsePath | Value Attribute | ||
| NONE SELECTED SELECTED_INTERN SELECTED_EXTERN SELECTED_LIMIT_1 SELECTED_LIMIT_2 SELECTED_LIMIT_3 SELECTED_LIMIT_4 SELECTED_POS SELECTED_NEG | ||
| NONE POWER_REMOVED SS1_ACTIVE SS1_ACTIVE_FAULTED SS2_ACTIVE SS2_ACTIVE_FAULTED SOS_ACTIVE SOS_ACTIVE_FAULTED SLS_ACTIVE SLS_ACTIVE_FAULTED SDI_POS_ACTIVE SDI_NEG_ACTIVE SLA_ACTIVE SLA_ACTIVE_FAULTED SLP_ACTIVE SLP_ACTIVE_FAULTED SLP_INOPERABLE |
7.10 OPC UA Variable Mapping to Drive Properties
Table 33 lists the OPC UA Variables and the drive properties represented by those Variables which are components of the drive ObjectTypes above.
The Variables listed are components of a parent folder which belongs to the Axis Object. The parent folder is specified in the row preceding the rows specifying the Variables which belong to this very folder.
| BrowseName | Drive Property represented |
| Monitoring | |
| AxisState | Actual state of the Axis/DO' internal state machine, e.g. S2, encoded as 0:MultiStateDiscreteType. The content of the EnumStrings lookup table Property is defined in Table 17. |
| ControlPriority | Leading control context, e.g. PROFIBUS or PROFINET, of the Axis/DO encoded as 0:MultiStateDiscreteType. The content of the EnumStrings lookup table Property is defined in Table 17. |
| ControlMode | Active control function in the overall control cascade, e.g. SPEED_CONTROL_MODE, encoded as 0:MultiStateDiscreteType. The content of the EnumStrings lookup table Property is defined in Table 17. |
| VelocityCommandValue | Commanded velocity of the controller, transmitted by the associated Telegram Signal. |
| VelocitySetpoint | Velocity setpoint as input for motor/axis control unit. |
| VelocityActualValue | Current velocity. |
| PositionCommandValue | Commanded position of the controller. |
| PositionSetpoint | Setpoint as input for motor/axis control unit. |
| PositionActualValue | Current position of motor or axis. |
| FrequencyCommandValue | Commanded frequency of the controller, transmitted by the associated Telegram Signal. |
| FrequencySetpoint | Frequency setpoint as input for motor/axis control unit. |
| AccelerationActualValue | Current acceleration of motor or axis. |
| OutputFrequency | Output frequency of the Axis/DO. |
| OutputVoltage | Output voltage of the Axis/DO. |
| OutputCosPhi | Actual motor power factor. |
| OutputCurrent | Actual output current measured at the clamp. |
| Torque | Actual axis torque. Provide for rotatory axis only. |
| Force | Actual axis force. Provide for linear axis only. |
| Power | Actual power consumption. |
| MotorTemperature | Actual motor temperature. |
| ConverterTemperature | Actual converter temperature. |
| DeviceTemperature | Actual device temperature. |
| <FeedbackSensor1..3Temperature> | Actual temperature of feedback sensor. |
| BrakeResistorTemperature | Actual temperature of brake resistor. |
| DcBusVoltage | Actual decent bus voltage value. |
| PositionFollowingError | Actual difference between PositionSetpoint and PositionActualValue. |
| VelocityFollowingError | Actual difference between VelocitySetpoint and VelocityActualValue. |
| BrakeStatus | Actual brake status encoded as 0:MultiStateDiscreteType. The content of the EnumStrings lookup table Property is defined in Table 34. The Variable shall not be provided if the Drive Axis has no brake. |
| ContouringError | Limit of contouring error supervision. |
| Override | Active override factor on programmed velocity in percent (100% == programmed velocity). |
| Maintenance | |
|---|---|
| PowerOnDuration | Actual duration of the power-on-state in milliseconds of the Axis/DO. |
| OperationDuration | Actual duration of performing effective operation of the Axis/DO (e.g. the Drive's motor "works") in milliseconds. |
| OperationCycleCounter | Number of switches between power-on and operation. |
| MotorCapacityUtilization | Utilization of motor thermal capacity, in % of motor load limit (0% - 100%). |
| ConverterCapacityUtilization | Utilization of converter thermal capacity, in % of converter load limit (0% - 100%). |
| CharacteristicsConverter | |
|---|---|
| InputConverterAcInputVoltage | Input alternating voltage. |
| OutputConverterPulseFrequency | Pulse frequency of the drive's converter. |
| IntermediateCircuitVoltageConfigured | Voltage of intermediate circuit determined by configuration data. |
| ConverterThermalLoadLimitConfigured | Thermal load limit of converter determined by configuration data. |
| ConverterExcessCurrentConfigured | Excess current of converter determined by configuration data. |
| BrakeResistorExcessCurrentLimit | Excess current limit of brake resistor, in ampere. |
| CharacteristicsMotorAndControl | |
|---|---|
| PowerRated | Rated power of the motor. |
| SpeedRated | Rated speed of rotatory motor. If the motor of the axis does not work rotatory, the Variable shall not be provided. |
| TorqueRated | Rated torque of the motor. |
| ForceRated | Rated force of a linear moving axis. |
| MaxCurrent | Maximum current the motor draws from the power supply. |
| UfRatio | Constant ratio of voltage and frequency. |
| RunUpVoltage | Voltage the motor creates at the feeder clamp during start-up. |
| DcBrakingCurrent | Current the motor draws during braking. |
| DcBrakingTime | Time needed in dc-braking mode until stand still if the braking current given by the DcBrakingCurrent Variable is applied |
| FeedbackMode | Sensing device used by closed loop control of the Axis/DO, e.g. FEEDBACK_SENSOR_1, encoded as 0:MultiStateDiscreteType. The content of the EnumStrings lookup table Property is defined in Table 17. |
| SpeedMaxConfigured | Maximum speed determined by configuration data. |
| TorqueMaxConfigured | Maximum torque determined by configuration data. |
| MotorThermalLoadLimitConfigured | Thermal load limit of motor determined by configuration data. |
| MotorExcessCurrentConfigured | Excess current of motor determined by configuration data. |
| MotorType | Kind of motor, e.g. STEPPER, INDUCTION_ROTATORY, etc. encoded as 0:MultiStateDiscreteType. The content of the EnumStrings lookup table Property is defined in Table 17. |
| PositionFollowingErrorLimit | Maximum allowed position deviation in the position closed loop control. Exceeding this limit causes position following error. |
| VelocityFollowingErrorLimit | Maximum allowed velocity deviation in the velocity closed loop control. Exceeding this limit causes velocity following error. |
| UnitOfLength | Internal setting of length unit. The length unit is used for transmitting position, velocity, acceleration, deceleration in the PROFIdrive standard telegram 9. This Variable should be provided for the application classes 3 and 5 if the Signals sub-aspect is provided. |
| LimitSupervision | |
|---|---|
| MotorCurrentLimitHigh | Current upper velocity limit of the Axis/DO. |
| MotorCurrentLimitLow | Current lower velocity limit of the Axis/DO. |
| TorqueLimit | Torque limit of the motor. |
| TorqueLimitLow | Lower torque limit of the motor. |
| TorqueLimitHigh | Upper torque limit of the motor. |
| SoftwareUpperPosLimit | Software upper position limit. |
| SoftwareLowerPosLimit | Software lower position limit. |
| TorqueLimiting | Indicates if torque limiting is active. |
| VelocityProfile | |
|---|---|
| JogSpeed1 | Jogging setpoint 1 value (see [PDP], chapter 6.3.3.3.4). |
| JogSpeed2 | Jogging setpoint 2 value (see [PI 3172 PDP], chapter 6.3.3.3.4). |
| JogPosInc1 | Jogging position increment 1. |
| JogPosInc2 | Jogging position increment 2. |
| NominalSpeed | Reference value for ramp up (down) used to calculate ramp acceleration (deceleration) |
| RfgRampUpTime | Actual ramp up time of the Ramp Function Generator (RFG), see [PDP], chapter 6.3.3, in seconds |
| RfgRampDownTime | Actual ramp down time of the RFG (see RfgRampUpTime above), in seconds |
| QuickStopRampDownTime | Quick stop ramp down time, in seconds. |
| RfgAcceleration | Actual ramp acceleration. |
| RampDeceleration | Actual ramp deceleration. |
| QuickStopRampDeceleration | Quick stop ramp deceleration. |
| MinimumVelocity | Lowest speed of the ramp-function. |
| MaximumVelocity | Highest speed of the ramp-function. |
| CharacteristicsMechanics | |
|---|---|
| Gearfactor | Rotation to rotation transmission factor. |
| SpindlePitch | Rotation to linear transmission factor. |
| FollowingError | Limit of following error supervision. |
| Homing | |
|---|---|
| HomingDirection | Homing direction (POSITIVE or NEGATIVE) |
| HomingSpeedToCam | Speed when moving to cam. |
| HomingSpeedToMark | Speed when moving to mark. |
| HomingPointOffset | Home position shift for adjustment of axis mechanical zero. |
| HomingMode | Active homing mode (ABSOLUTE, REF_MARK, DIST_CODE, FLY). |
| Diagnosis | |
|---|---|
| Logbook | Representation of the Axis/DO fault buffer. |
| Element Index (==Value) | Element Value (locale "en") | Description |
| 0 | "NO_BRAKE" | No brake. |
| 1 | "OPEN_BRAKE" | Brake is open and has no effect. |
| 2 | "MECHANIC_BRAKE_APPLIED" | The mechanic brake is active. |
| 3 | "DC_BRAKE_APPLIED" | The DC brake is active. |
| 4 | "ROTOR_SHORT_APPLIED" | Rotor short circuit is active. |
8 OPC UA EventTypes
8.1 AxisEventType
The AxisEventType is the abstract base for the EventTypes provided by the different subtypes of the DriveAxisType. Derived EventTypes render certain components mandatory, dependent on the nature of the event reported.
| Attribute | Value | ||||
| BrowseName | AxisEventType | ||||
| IsAbstract | True | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of 0:BaseEventType defined in [OPC 10000-5]. | |||||
| 0:HasProperty | Variable | AxisState | 0:UInt16 | 0:PropertyType | M, RO |
| 0:HasProperty | Variable | ControlPriority | 0:UInt16 | 0:PropertyType | M, RO |
| 0:HasProperty | Variable | OutputCurrent | 0:Float | 0:PropertyType | O, RO |
| 0:HasProperty | Variable | Torque | 0:Float | 0:PropertyType | O, RO |
| 0:HasProperty | Variable | Force | 0:Float | 0:PropertyType | O, RO |
| 0:HasProperty | Variable | Power | 0:Float | 0:PropertyType | O, RO |
| 0:HasProperty | Variable | MotorTemperature | 0:Float | 0:PropertyType | O, RO |
| 0:HasProperty | Variable | ConverterTemperature | 0:Float | 0:PropertyType | O, RO |
| 0:HasProperty | Variable | DeviceTemperature | 0:Float | 0:PropertyType | O, RO |
| 0:HasProperty | Variable | DcBusVoltage | 0:Float | 0:PropertyType | O, RO |
| 0:HasProperty | Variable | PositionFollowingError | 0:Float | 0:PropertyType | O, RO |
| 0:HasProperty | Variable | VelocityFollowingError | 0:Float | 0:PropertyType | O, RO |
| 0:HasProperty | Variable | ControlMode | 0:UInt16 | 0:PropertyType | O, RO |
| 0:HasProperty | Variable | <FeedbackSensor1..3Temperature> | 0:Float | 0:PropertyType | OP, RO |
| 0:HasProperty | Variable | BrakeResistorTemperature | 0:Float | 0:PropertyType | O, RO |
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Limit Events |
The Properties provided are the components of the "Monitoring" folder (for a description see Table 33 section for Monitoring folder). The Values of these properties shall constitute a snapshot of the Axis/DO state when the Event is fired.
8.2 AxisSwOvertravelEventType
The AxisSwOvertravelEventType Event is fired if a motion range software limit of the axis is exceeded.
| Attribute | Value | ||||
| BrowseName | AxisSwOvertravelEventType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of AxisEventType. | |||||
| HasProperty | Variable | IsUpperSwLimit | 0:Boolean | 0:PropertyType | M,RO |
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Limit Events |
The IsUpperSwLimit Property indicates whether the upper software limit is exceeded (True) or the lower software limit is exceeded (False).
8.3 AxisHwOvertravelEventType
The AxisHwOvertravelEventType is fired if a motion range hardware limit of the axis is exceeded.
| Attribute | Value | ||||
| BrowseName | AxisHwOvertravelEventType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of AxisEventType. | |||||
| HasProperty | Variable | IsUpperHwLimit | 0:Boolean | 0:PropertyType | M,RO |
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Limit Events |
The IsUpperHwLimit Property indicates whether the upper hardware limit is exceeded (True) or the lower hardware limit is exceeded (False).
8.4 TorqueLimitEventType
The TorqueLimitEventType Event is fired if a torque range limit of the axis is exceeded.
| Attribute | Value | ||||
| BrowseName | TorqueLimitEventType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of AxisEventType. | |||||
| HasProperty | Variable | Torque | 0:Float | 0:PropertyType | M, RO |
| HasProperty | Variable | TorqueLimit | 0:Float | 0:PropertyType | M, RO |
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Limit Events |
The Torque Property contains the actual torque value.
The TorqueLimit Property contains the torque limit which was exceeded causing the Event to be fired.
8.5 ForceLimitEventType
The ForceLimitEventType Event is fired if a force range limit of a linear axis is exceeded.
| Attribute | Value | ||||
| BrowseName | ForceLimitEventType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of AxisEventType. | |||||
| HasProperty | Variable | Force | 0:Float | 0:PropertyType | M, RO |
| HasProperty | Variable | ForceLimit | 0:Float | 0:PropertyType | M, RO |
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Limit Events |
The Force Property contains the actual force.
The ForceLimit Property contains the force limit which was exceeded causing the Event to be fired.
8.6 MotorCurrentLimitEventType
The MotorCurrentLimitEventType Event is fired if a motor current limit of the axis's motor is exceeded.
| Attribute | Value | ||||
| BrowseName | MotorCurrentLimitEventType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of AxisEventType. | |||||
| 0:HasProperty | Variable | OutputCurrent | 0:Float | 0:PropertyType | M, RO |
| 0:HasProperty | Variable | MotorCurrentLimitHigh | 0:Float | 0:PropertyType | M, RO |
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Limit Events |
The OutputCurrent Property contains the actual motor current.
The MotorCurrentLimitHigh Property contains the upper motor current limit exceeded causing the Event to be fired.
8.7 DiagnosisAlarmType
| Attribute | Value | ||||
| BrowseName | DiagnosisAlarmType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of 0:AlarmConditionType defined in [OPC 10000-9]. | |||||
| HasProperty | Variable | LogEntry | 3:LogEntryDataType | 0:PropertyType | M,RO |
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Diagnosis Alarms |
9 OPC UA VariableTypes
9.1 AxisTypeVariableType
The AxisTypeVariableType is a subtype of the 0:MultiStateDiscreteType. It is used to encode the kind of mechanical motion a Drive performs. It is formally defined in Table 42.
| Attribute | Value | |||||
| BrowseName | AxisTypeVariableType | |||||
| IsAbstract | False | |||||
| ValueRank | -1 (-1 = Scalar) | |||||
| DataType | 0:Byte | |||||
| References | NodeClass | BrowseName | DataType | TypeDefinition | Other | |
|---|---|---|---|---|---|---|
| Subtype of the 0:MultiStateDiscreteType defined in [OPC 10000-8] | ||||||
| Conformance Units | ||||||
|---|---|---|---|---|---|---|
| PDRV Measurement |
| BrowsePath | Value Attribute |
| 0:EnumStrings | LINEAR ROTATORY ROTATORY_MODULO |
The Value shall be "LINEAR_AXIS" for linear moving axis and "ROTATORY_AXIS" for axis types performing rotatory movement.
9.2 HomingDirectionType
The HomingDirectionType is a subtype of the 0:MultiStateDiscreteType. It is formally defined in Table 44.
| Attribute | Value | |||||
| BrowseName | HomingDirectionType | |||||
| IsAbstract | False | |||||
| ValueRank | -1 (-1 = Scalar) | |||||
| DataType | 0:Byte | |||||
| References | NodeClass | BrowseName | DataType | TypeDefinition | Other | |
|---|---|---|---|---|---|---|
| Subtype of the 0:MultiStateDiscreteType defined in [OPC 10000-8] | ||||||
| Conformance Units | ||||||
|---|---|---|---|---|---|---|
| PDRV Measurement |
| BrowsePath | Value Attribute |
| 0:EnumStrings | POSITIVE NEGATIVE |
9.3 HomingModeType
The HomingModeType is a subtype of the 0:MultiStateDiscreteType. It is formally defined in Table 46.
| Attribute | Value | |||||
| BrowseName | HomingModeType | |||||
| IsAbstract | False | |||||
| ValueRank | -1 (-1 = Scalar) | |||||
| DataType | 0:Byte | |||||
| References | NodeClass | BrowseName | DataType | TypeDefinition | Other | |
|---|---|---|---|---|---|---|
| Subtype of the 0:MultiStateDiscreteType defined in [OPC 10000-8] | ||||||
| Conformance Units | ||||||
|---|---|---|---|---|---|---|
| PDRV Measurement |
| BrowsePath | Value Attribute |
| 0:EnumStrings | ABSOLUTE REF_MARK DIST_CODE FLY |
9.4 TemperatureVariableType
The TemperatureVariableType contains a temperature value. It is formally defined in Table 48.
| Attribute | Value | |||||
| BrowseName | TemperatureVariableType | |||||
| IsAbstract | False | |||||
| ValueRank | -1 (-1 = Scalar) | |||||
| DataType | 0:Float | |||||
| References | NodeClass | BrowseName | DataType | TypeDefinition | Other | |
|---|---|---|---|---|---|---|
| Subtype of the 0:AnalogUnitType defined in [OPC 10000-8] | ||||||
| HasProperty | Variable | WarningThreshold | 0:Float | 0:PropertyType | O,RO | |
| HasProperty | Variable | FaultThreshold | 0:Float | 0:PropertyType | O,RO | |
| Conformance Units | ||||||
|---|---|---|---|---|---|---|
| PDRV Measurement |
The Value of the Variable contains a temperature value provided by the Server. The Server might provide the optional InstrumentRange and EURange Properties of the 0:AnalogUnitType the TemperatureVariableType is derived from.
The WarningThreshold Property contains a temperature threshold causing a fault buffer warning entry if the temperature value exceeds this threshold.
The FaultThreshold Property contains a temperature threshold causing a fault buffer error entry if the temperature value exceeds this threshold.
The engineering unit used for the Value of these two Properties shall be equal to the engineering unit used for the Value of the TemperatureVariableType Variable and indicated by the EngineeringUnits Property.
10 Profiles and Conformance Units
10.1 Conformance Units
Table 49 defines the corresponding ConformanceUnits for the OPC UA for Drive Information Model.
| Category | Title | Description |
|---|---|---|
| Server | PDRV Measurement | Supports Variables in the "Actual and Command Values" sub-aspect. |
| Server | PDRV Axis Properties | Supports Variables in the "Axis Properties" sub-aspect. |
| Server | PDRV Limit Events | Supports limit Events such as AxisSwOvertravelEventType, AxisHwOvertravelEventType, TorqueLimitEventType, ForceLimitEventType and MotorCurrentLimitEventType according to the axis type. This includes support of the OPC UA "Standard Event Subscription Server Facet". |
| Server | PDRV Logbook Readable | Supports the Logbook Object in the "Diagnosis" sub-aspect. |
| Server | PDRV Logbook Events | Supports LogbookEventType and EncoderDiagnosisEventType Notifications. EncoderChannelType Objects might provide EncoderProbeLatchEventType and EncoderRefLatchEventType Notifications. This includes support of the OPC UA "Standard Event Subscription Server Facet". |
| Server | PDRV Diagnosis Alarms | Supports DiagnosisAlarmType Notifications. This includes support of the OPC UA "A & C Alarm Server Facet". |
| Server | PDRV Signals | Supports Signal Variables in the "Signals" sub-aspect. |
| Server | PDRV Security Roles | Server supports role-based security and restricts Method invocation to Sessions with granted "Operator" role. This includes support of the OPC UA "Security User Access Control Base Facet". |
10.2 Profiles
10.2.1 Profile list
Table 50 lists all Profiles defined in this document and defines their URIs.
| Profile | URI |
|---|---|
| PDRV Small Server Profile | http://opcfoundation.org/UA-Profile/PDRV/Server/Small |
| PDRV Standard Server Profile | http://opcfoundation.org/UA-Profile/PDRV/Server/Standard |
| PDRV Full Server Profile | http://opcfoundation.org/UA-Profile/PDRV/Server/Full |
10.2.2 Server Facets
10.2.2.1 Overview
The following sections specify the Facets available for Servers that implement the PROFINET Drives companion specification. Each section defines and describes a Facet or Profile. Figure 28 shows the intended usage of the specified Profiles.
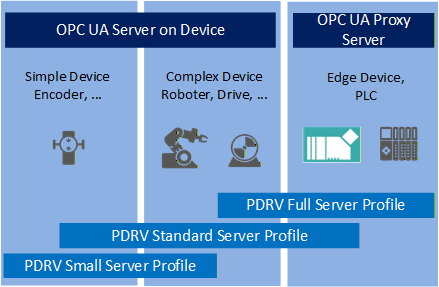
10.2.2.2 PDRV Small Server Profile
Table 51 defines a Profile containing the minimum OPC UA functionality and PDRV Conformance Units any PROFINET Drives Server at least shall provide. Intended to be implemented by Servers on simple Devices.
| Group | Conformance Unit / Profile Title | Mandatory / Optional |
| Profile | 0:Nano Embedded Device 2017 Server Profile http://opcfoundation.org/UA-Profile/Server/NanoEmbeddedDevice2017 | |
| Profile | 0:ComplexType 2017 Server Facet http://opcfoundation.org/UA-Profile/Server/ComplexTypes2017 | |
| Profile | 0:Data Access Server Facet http://opcfoundation.org/UA-Profile/Server/DataAccess | |
| PDRV | PDRV Measurement | M |
| PDRV | PDRV Axis Properties | M |
| PDRV | PDRV Logbook Readable | O |
| PDRV | PDRV Logbook Events | O |
| PDRV | PDRV Limit Events | O |
| PDRV | PDRV Security Roles | O |
10.2.2.3 PDRV Standard Server Profile
Table 52 defines a Profile that extends the Small Server Profile by adding Event generation. Intended be implemented by Servers on complex Devices like Drives or robots, but also on small Devices, Edge Devices and PLC's.
| Group | Conformance Unit / Profile Title | Mandatory / Optional |
|---|---|---|
| Profile | PDRV Small Server Profile | |
| PDRV | PDRV Logbook Readable | M |
| PDRV | PDRV Logbook Events | M |
| PDRV | PDRV Limit Events | M |
| PDRV | PDRV Signals | O |
10.2.2.4 PDRV Full Server Profile
Table 52 defines a Profile that extends the Standard Server Profile by adding Alarm generation. Intended to be implemented by Servers on Complex Devices, Edge Devices and PLC's.
| Group | Conformance Unit / Profile Title | Mandatory / Optional |
|---|---|---|
| Profile | PDRV Standard Server Profile | |
| PDRV | PDRV Diagnosis Alarms | M |
10.2.3 Client Facets
This specification does not define Client Facets.
11 Namespaces
11.1 Namespace Metadata
Table 54 defines the namespace metadata for this document. The Object is used to provide version information for the namespace and an indication about static Nodes. Static Nodes are identical for all Attributes in all Servers, including the Value Attribute. See OPC 10000-5 for more details.
The information is provided as Object of type NamespaceMetadataType. This Object is a component of the Namespaces Object that is part of the Server Object. The NamespaceMetadataType ObjectType and its Properties are defined in OPC 10000-5.
The version information is also provided as part of the ModelTableEntry in the UANodeSet XML file. The UANodeSet XML schema is defined in OPC 10000-6.
| Attribute | Value | ||
| BrowseName | http://opcfoundation.org/UA/PDRV/ | ||
| Property | DataType | Value | |
|---|---|---|---|
| NamespaceUri | String | http://opcfoundation.org/UA/PDRV/ | |
| NamespaceVersion | String | 1.0.0 | |
| NamespacePublicationDate | DateTime | 2024-07-04 | |
| IsNamespaceSubset | Boolean | False | |
| StaticNodeIdTypes | IdType[] | 0 | |
| StaticNumericNodeIdRange | NumericRange [] | ||
| StaticStringNodeIdPattern | String | ||
Note: The IsNamespaceSubset Property is set to False as the UANodeSet XML file contains the complete Namespace. Servers only exposing a subset of the Namespace need to change the value to True.
11.2 Handling of OPC UA Namespaces
Namespaces are used by OPC UA to create unique identifiers across different naming authorities. The Attributes NodeId and BrowseName are identifiers. A Node in the UA AddressSpace is unambiguously identified using a NodeId. Unlike NodeIds, the BrowseName cannot be used to unambiguously identify a Node. Different Nodes may have the same BrowseName. They are used to build a browse path between two Nodes or to define a standard Property.
Servers may often choose to use the same namespace for the NodeId and the BrowseName. However, if they want to provide a standard Property, its BrowseName shall have the namespace of the standards body although the namespace of the NodeId reflects something else, for example the EngineeringUnits Property. All NodeIds of Nodes not defined in this document shall not use the standard namespaces.
Table 55 provides a list of namespaces typically used in a PROFINET Drives OPC UA Server.
| NamespaceURI | Description |
|---|---|
| http://opcfoundation.org/UA/ | Namespace for NodeIds and BrowseNames defined in the OPC UA specification. This namespace shall have namespace index 0. |
| Local Server URI | Namespace for nodes defined in the local server. This namespace shall have namespace index 1. |
| http://opcfoundation.org/UA/DI/ | Namespace for NodeIds and BrowseNames defined in OPC 10000-100. The namespace index is Server specific. |
| http://opcfoundation.org/UA/PNENC/ | Namespace for NodeIds and BrowseNames defined in OPC 30143 ENC. The namespace index is Server specific. |
| http://opcfoundation.org/UA/PDRV/ | Namespace for NodeIds and BrowseNames defined in this document. The namespace index is Server specific. |
| Vendor specific types | A Server may provide vendor-specific types like types derived from ObjectTypes defined in this document in a vendor-specific namespace. |
| Vendor specific instances | A Server provides vendor-specific instances of the standard types or vendor-specific instances of vendor-specific types in a vendor-specific namespace. It is recommended to separate vendor specific types and vendor specific instances into two or more namespaces. |
Table 56 provides a list of namespaces and their indices used for BrowseNames in this document. The default namespace of this document is not listed since all BrowseNames without prefix use this default namespace.
| NamespaceURI | Namespace Index | Example |
|---|---|---|
| http://opcfoundation.org/UA/ | 0 | 0:EngineeringUnits |
| http://opcfoundation.org/UA/DI/ | 2 | 2:LockingServicesType |
| http://opcfoundation.org/UA/PNENC/ | 3 | 3:LogbookType |
Annex A PROFINET Drives Namespace and mappings (Normative)
A.1 NodeSet and Supplementary Files for PROFINET Drives Information Model
The PROFINET Drives Information Model is identified by the following URI:
http://opcfoundation.org/UA/PDRV/
Documentation for the NamespaceUri can be found "here".
The NodeSet associated with this version of specification can be found here:
https://reference.opcfoundation.org/nodesets/?u=http://opcfoundation.org/UA/PDRV/&v=1.0.0&ns=1
The NodeSet associated with the latest version of the specification can be found here:
https://reference.opcfoundation.org/nodesets/?u=http://opcfoundation.org/UA/PDRV/&ns=1
The supplementary files associated with this version of specification can be found here:
https://reference.opcfoundation.org/nodesets/?u=http://opcfoundation.org/UA/PDRV/&v=1.0.0&i=2
The supplementary files associated with the latest version of the specification can be found here:
https://reference.opcfoundation.org/nodesets/?u=http://opcfoundation.org/UA/PDRV/&i=2
_____________
Annex B (normative)
B.1 Fault code definition
Table 57 contains the fault code definitions as defined in [PI 3172 PDP], chapter 6.3.8.4, Table 117.
|
Fault
Code |
Fault Class
Name | Comments |
| 01 | Microcontroller Hardware or Software | Comprises exceptions in the main CPU of the drive, memory/checksum errors,over-/underrun in control processes, controller self test failed, etc. |
| 02 | Mains Supply | Comprises exceptions out of the mains supply like phase error, mains over-/untervoltage, etc. |
| 03 | Low Voltage Supply | Comprises exceptions out of the low voltage supply supplied to the drive system (e.g. external 24 V supply). |
| 04 | DC Link Overvoltage | Exception because of overvoltage of the DC link, which typically is a result of excessive energy feedback from the motor/process or a faulty dummy load. |
| 05 | Power Electronics | Comprises exceptions in the inverter stage of the drive: phase current measurement errors, overcurrent supervision error. |
| 06 | Overtemperature Electronic Device | Overtemperature because of overload or faulty cooling system. |
| 07 | Isolation Fault | Exception because of over-current resulting from shortage between phase and phase or phase and ground. |
| 08 | Motor Overload | Exception because of over-temperature of the motor. This may be a result from motor overload or a faulty cooling system. |
| 09 | Fieldbus System | Exception from the Communication System between the drive (DU) and the controller. For example, this may be temporary communication frame errors or exceptions in the isochronous operation. |
| 10 | Safety Channel | Exception because of a fault in the drive safety function (e.g. results from the redundant safety paths don't match). |
| 11 | Feedback | Exception because of an exception in the feedback interface or the feedback sensor (e.g. encoder, position or velocity measurement system). |
| 12 | Internal Communication | Exception from the drive internal Communication System if there is a separate physical entity related to the internal Communication System (e.g. communication backplane, bus cable, etc.). |
| 13 | Infeed | Comprises exceptions out of the infeed unit of the drive: for example missing DC link voltage, etc. |
| 14 | Brake Resistor | Exception from the dummy load circuit of the drive: Over-temperature brake resistor, brake resistor no current, etc. |
| 15 | Line Filter | Exception from the main line filter in front of the infeed unit if the filter is a separate physical entity (e.g. over-temperature, etc.). |
| 16 | External | Exception posted by additional input channels to the drive. For example, a separate custom specific temperature sensor connected to the drive system by an digital input. |
| 17 | Technology | Exception from a drive internal process supervision task/system. For example, supervision of a torque limit. |
| 18 | Engineering | Exception from differences between real and expected configuration information. |
| 19 | Other | Necessary because every entry in the actual fault situation of the fault buffer and the warning mechanism shall result in an exception in one of the PROFIdrive fault classes because of consistency. Therefore, if a drive exception does not match with one of the defined fault classes it shall be mapped with the fault class (Other). |
| 20 | Auxiliary Device | Exception because of a fault in an auxiliary device of the drive which cannot be mapped to another fault class (e.g. special cooling devices often used for large drives). |
Annex C (normative)
C.1 Signal and parameter mapping to OPC UA Variables
The PROFINET Drive Information Model covers a subset of the Signals and parameters defined in [PI 3172 PDP]. Table 58 gives an overview which parameters and Signals are mapped to OPC UA Variables in the PROFINET Drive Information Model.
Table 58 is grouped into several sections headed by the name of the folder the listed Variable is part of in the Drive Information Model. The "PD Application Class" column entries show the PROFIdrive Application Class of the concrete Axis ObjectTypes providing the respective Variable. If a Variable is not provided for a specific Application Class, the respective column is empty.
The "Signal Variable" column contains the BrowseName of a Signal Variable representing a Standard Signal in the "PNSignals" folder, as described in chapter 7.1, "PNSignals folder in Signals sub-aspect".
Variables connected by 0:RepresentsSameEntityAs References (see Figure 11 also) are entered in the same line of Table 58. If there is no connection, the respective Variables are entered in their section of the table separately.
The "PROFIdrive Signal/Param" column contains the name of the Signal (see [PI 3172 PDP], Table 86 - Signal list - assignment) or PROFIdrive Parameter (see [PI 3172 PDP], Table 144 - PROFIdrive Parameter listed by number) the respective Variable represents. If a Variable represents a Signal, the Signal number is listed in the "Signal No." column. If the Variable represents a parameter, the corresponding PROFIdrive Parameter number is entered in the "Param No." column. Some Variables are available both by a Signal and a PROFIdrive Parameter.
| <Folder>/Variable | PD Application Class | Signal Variable | PROFIdrive Signal/Param | Signal No. | Param No. | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| BrowseName | DataType | 1 | 3 | 4 | 5 | BrowseName | DataType | |||
| Monitoring Folder | PNSignals Folder | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| AccelerationActualValue | 0:Float | X | X | X | ||||||
| Override | 0:Float | X | ||||||||
| AxisState | 0:UInt16 | X | X | X | X | ZSW1 | 0:UInt16 | Status word 1 | 2 | 968 |
| BrakeResistorTemperature | 0:Float | X | X | X | X | |||||
| BrakeStatus | 0:Byte | X | X | X | ||||||
| ControlMode | 0:UInt16 | X | X | X | X | Operating Mode | 930 | |||
| ControlPriority | 0:UInt16 | X | X | X | X | Control Priority | 928 | |||
| DcBusVoltage | 0:Float | X | X | X | X | DC bus voltage rated | 60226 | |||
| PositionFollowingError | 0:Float | X | X | X | X | |||||
| VelocityFollowingError | 0:Float | X | X | X | X | |||||
| DeviceTemperature | 0:Float | X | X | X | X | |||||
| <FeedbackSensor1..3Temperature> | 0:Float | X | X | X | X | |||||
| Force | 0:Float | X | X | X | X | |||||
| FrequencyActualValue | 0:Float | FIST | 0:UInt16 | Frequency actual value | 63 | |||||
| FrequencyCommandValue | 0:Float | X | FSOLL | 0:UInt16 | Frequency setpoint | 55 | ||||
| FrequencySetpoint | 0:Float | X | ||||||||
| ConverterTemperature | 0:Float | X | X | X | X | Inverter temperature | 60235 | |||
| LimitFollowingError | 0:Float | X | X | X | X | |||||
| MotorTemperature | 0:Float | X | X | X | X | Motor temperature | 60235 | |||
| OutputCosPhi | 0:Float | X | ||||||||
| OutputCurrent | 0:Float | X | X | X | X | IAIST | 0:UInt16 | Output current | 59 | |
| OutputFrequency | 0:Float | X | ||||||||
| OutputVoltage | 0:Float | X | ||||||||
| PositionActualValue | 0:Float | X | X | XIST_A | 0:Int32 | Position actual value A | 28 | |||
| PositionCommandValue | 0:Float | X | XSOLL_A | 0:Int32 | Position setpoint value A | 27 | ||||
| PositionSetpoint | 0:Float | X | X | |||||||
| Power | 0:Float | X | X | X | X | PIST | 0:UInt16 | Active power | 62 | |
| Torque | 0:Float | X | X | X | X | MIST | 0:Int16 | Torque actual value | 60 | |
| VelocityActualValue | 0:Float | X | X | X | X | NIST_A(B) | 0:Int16(32) | Speed actual value A(B) | 6(8) | |
| VelocityCommandValue | 0:Float | X | X | NSOLL_A(B) | 0:Int16(32) | Speed Setpoint A(B) | 5(7) | |||
| VelocitySetpoint | 0:Float | X | X | X | ||||||
| CharacteristicsConverter Folder | PNSignals Folder | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| BrakingResistorExcessCurrentLimit | 0:Float | X | X | X | X | |||||
| ContouringError | 0:Float | X | ||||||||
| FollowingError | 0:Float | X | ||||||||
| IntermediateCircuitVoltageConfigured | 0:UInt16 | X | X | X | X | |||||
| InputConverterAcInputVoltage | 0:Float | X | X | X | X | AC input voltage | 60510 | |||
| ConverterExcessCurrentConfigured | 0:Float | X | X | X | X | |||||
| BrakeResistorExcessCurrentLimit | 0:Float | X | X | X | X | |||||
| OutputConverterPulseFrequency | 0:Float | X | X | X | X | Inverter pulse frequency | 60540 | |||
| ConverterThermalLoadLimitConfigured | 0:Float | X | X | X | X | |||||
| CharacteristicsMechanics Folder | PNSignals Folder | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ContouringError | 0:Float | |||||||||
| FollowingError | 0:Float | |||||||||
| Gearfactor | 0:Float | X | ||||||||
| SpindlePitch | 0:Float | X | ||||||||
| CharacteristicsMotorAndControl Folder | PNSignals Folder | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| FeedbackMode | 0:UInt16 | X | X | X | X | |||||
| MotorExcessCurrentConfigured | 0:Float | X | X | X | X | |||||
| MotorThermalLoadLimitConfigured | 0:Float | X | X | X | X | |||||
| MotorType | 0:Byte | X | X | X | X | |||||
| PositionFollowingErrorLimit | 0:Byte | X | X | X | X | |||||
| VelocityFollowingErrorLimit | 0:Byte | X | X | X | X | |||||
| SpeedMaxConfigured | 0:Float | X | X | X | X | |||||
| PowerRated | 0:Float | X | X | X | X | |||||
| SpeedRated | 0:Float | X | X | X | X | Velocity reference value | 60000 | |||
| TorqueRated | 0:Float | X | X | X | X | |||||
| ForceRated | 0:Float | X | X | X | X | |||||
| MaxCurrent | 0:Float | X | X | X | X | |||||
| UfRatio | 0:Float | X | X | X | X | |||||
| RunUpVoltage | 0:Float | X | X | X | X | |||||
| DcBrakingCurrent | 0:Float | X | X | X | X | |||||
| DcBrakingTime | 0:Float | X | X | X | X | |||||
| TorqueMaxConfigured | 0:Float | X | X | X | X | |||||
| UnitOfLength | 0:Float | X | X | |||||||
| LimitSupervision Folder | PNSignals Folder | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| MotorCurrentLimitHigh | 0:Float | X | X | |||||||
| MotorCurrentLimitLow | 0:Float | X | X | |||||||
| SoftwareLowerPosLimit | 0:Float | X | X | X | ||||||
| SoftwareUpperPosLimit | 0:Float | X | X | X | ||||||
| TorqueLimiting | 0:Boolean | X | X | X | ||||||
| TorqueLimit | 0:Float | X | ||||||||
| TorqueLimitHigh | 0:Float | X | X | X | ||||||
| TorqueLimitLow | 0:Float | X | X | X | ||||||
| Maintenance Folder | PNSignals Folder | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| OperationCycleCounter | 0:UInteger | X | X | X | X | |||||
| ConverterCapacityUtilization | 0:UInt16 | X | X | X | X | |||||
| MotorCapacityUtilization | 0:UInt16 | X | X | X | X | |||||
| OperationDuration | 0:Duration | X | X | X | X | |||||
| PowerOnDuration | 0:Duration | X | X | X | X | |||||
| TraversingTask Object | PNSignals Folder | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Acceleration | 0:Float | X | MDI_ACC | 0:UInt16 | 36 | |||||
| Deceleration | 0:Float | X | MDI_DEC | 0:UInt16 | 37 | |||||
| PositioningMode | 0:UInt16 | X | MDI_MOD | 0:UInt16 | 38 | |||||
| StateMachineState | 0:UInt16 | X | ||||||||
| TargetPosition | 0:Float | X | MDI_TARPOS | 0:Int32 | 34 | |||||
| TraversingTaskNumber | 0:Int32 | X | AKTSATZ | 0:UInt16 | Actual traversing block | 33 | ||||
| Velocity | 0:Float | X | MDI_VELOCITY | 0:Int32 | 35 | |||||
| VelocityProfile Folder | PNSignals Folder | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| JogSpeed1 | 0:Float | X | X | |||||||
| JogSpeed2 | 0:Float | X | X | |||||||
| JogPosInc1 | 0:Float | X | ||||||||
| JogPosInc2 | 0:Float | X | ||||||||
| MaximumVelocity | 0:Float | X | Maximum Speed | 60482 | ||||||
| MinimumVelocity | 0:Float | X | Minimum Speed | 60480 | ||||||
| NominalSpeed | 0:Float | X | X | X | X | |||||
| RfgRampUpTime | 0:Float | X | ||||||||
| RfgAcceleration | 0:Float | X | ||||||||
| RampDeceleration | 0:Float | X | X | X | X | |||||
| RfgRampDownTime | 0:Float | X | X | X | X | |||||
| QuickStopRampDeceleration | 0:Float | X | X | X | X | |||||
| QuickStopRampDownTime | 0:Float | X | X | X | X | |||||
| Homing Folder | PNSignals Folder | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| HomingDirection | 0:Byte | X | X | |||||||
| HomingSpeedToCam | 0:Float | X | X | |||||||
| HomingSpeedToMark | 0:Float | X | X | |||||||
| HomingPointOffset | 0:Float | X | X | |||||||
| HomingMode | 0:Byte | X | X | |||||||
| PNSignals Folder | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| X | X | X | X | STW1 | 0:UInt16 | Control word 1 | 1 | |||
| X | X | X | X | STW2 | 0:UInt16 | Control word 2 | 3 | |||
| X | X | X | X | ZSW2 | 0:UInt16 | Status word 2 | 4 | |||
| X | X | X | X | G1_STW | 0:UInt16 | Sensor 1 control word | 9 | |||
| X | X | X | X | G1_ZSW | 0:UInt16 | Sensor 1 status word | 10 | |||
| X | X | X | X | G1_XIST1 | 0:UInt32 | Sensor 1 position actual value 1 | 11 | |||
| X | X | X | X | G1_XIST2 | 0:UInt32 | Sensor 1 position actual value 2 | 12 | |||
| X | X | X | X | G2_STW | 0:UInt16 | Sensor 2 control word | 13 | |||
| X | X | X | X | G2_ZSW | 0:UInt16 | Sensor 2 status word | 14 | |||
| X | X | X | X | G2_XIST1 | 0:UInt32 | Sensor 2 position actual value 1 | 15 | |||
| X | X | X | X | G1_XIST2 | 0:UInt32 | Sensor 2 position actual value 2 | 16 | |||
| X | X | X | X | G3_STW | 0:UInt16 | Sensor 3 control word | 17 | |||
| X | X | X | X | G3_ZSW | 0:UInt16 | Sensor 3 status word | 18 | |||
| X | X | X | X | G3_XIST1 | 0:UInt32 | Sensor 3 position actual value 1 | 19 | |||
| X | X | X | X | G3_XIST2 | 0:UInt32 | Sensor 3 position actual value 2 | 20 | |||
| X | X | X | X | E_DIGITAL | 0:UInt16 | Input (digital) | 21 | |||
| X | X | X | X | A_DIGITAL | 0:UInt16 | Output (digital) | 22 | |||
| X | X | X | X | E_ANALOG | 0:UInt16 | Input (analog) | 23 | |||
| X | X | X | X | A_ANALOG | 0:UInt16 | Output (analog) | 24 | |||
| X | X | X | X | XERR | 0:Int32 | System deviation | 25 | |||
| X | X | X | X | KPC | 0:Int32 | Position controller, gain factor | 26 | |||
| X | X | X | X | XIST_B | 0:Int32 | Position actual value B | 29 | |||
| X | X | X | X | XIST_C | 0:Int32 | Position actual value C | 30 | |||
| X | X | X | X | XIST_D | 0:Int32 | Position actual value D | 31 | |||
| X | X | X | X | SATZANW | 0:UInt16 | Traversing block selection | 32 | |||
| X | X | X | X | G1_XIST3 | 0:UInt64 | Sensor 1 position actual value 3 | 39 | |||
| X | X | X | X | IAIST_GLATT | 0:UInt16 | Output current smoothed | 51 | |||
| X | X | X | X | ITIST_GLATT | 0:Int16 | Active current (torque proportional) | 52 | |||
| X | X | X | X | MIST_GLATT | 0:Int16 | Torque actual value smoothed | 53 | |||
| X | X | X | X | PIST_GLATT | 0:UInt16 | Active power smoothed | 54 | |||
| X | X | X | X | FIST_GLATT | 0:UInt16 | Frequency actual value smoothed | 56 | |||
| X | X | X | X | NIST_A_GLATT | 0:Int16 | Speed actual value A | 57 | |||
| X | X | X | X | MELD_NAMUR | 0:UInt16 | Drive status/fault word | 58 | |||
| X | X | X | X | ITIST | 0:UInt16 | Active current smoothed (tor. prop.) | 61 | |||
| X | X | X | X | STW2_ENC | 0:UInt16 | Control word 2 for Encoder | 80 | |||
| X | X | X | X | ZSW2_ENC | 0:UInt16 | Status word 2 for Encoder | 81 | |||
Annex D (normative)
D.1 Relationship of asset model and functional model
The functional model defined in this specification does not contain asset related information, such as serial number or vendor identification. Asset information models are provided by OPC UA for Machinery (see [OPC 40001-1] and OPC UA for Powertrain (see [OPC 40400-1]). This specification defines how the functional model relates to the asset model if asset related data shall be provided.
Figure shows the "0:IsHostedBy" cross-aspect reference connecting the Axis/DO Object with the Powertrain:PtAssetType Object. This ObjectType implements the Machinery:IMachineryItemVendorNameplateType Interface and provides Properties for basic asset information.
The Powertrain:PtAssetMotor Object relates to an additional part of the modelled Device using the UAFX:ConnectedTo (see [OPC 10000-81]) ReferenceType.
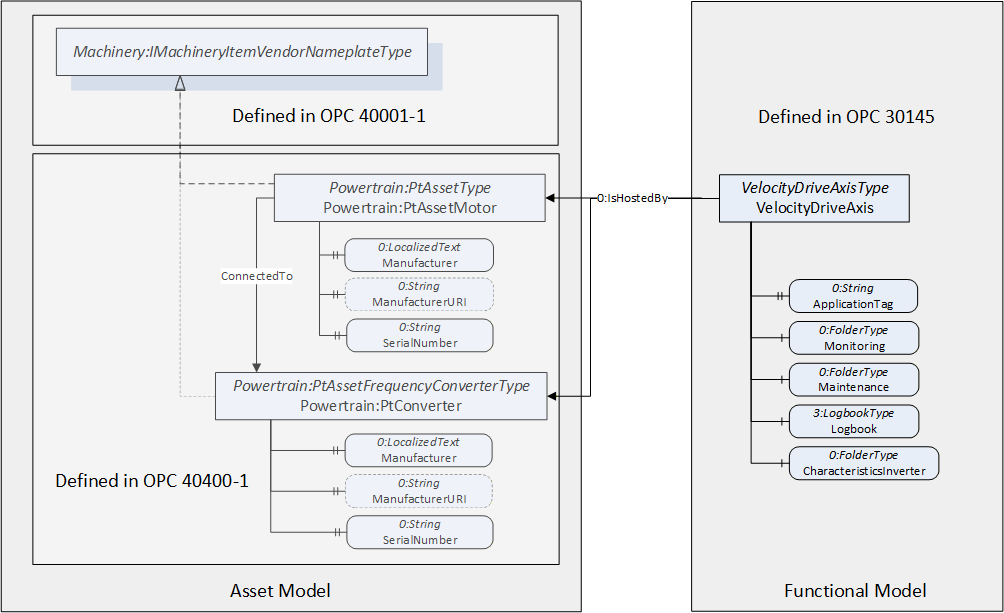
Agreement of Use
COPYRIGHT RESTRICTIONS
This document is provided "as is" by the OPC Foundation and the PROFIBUS Nutzerorganisation e.V..
Right of use for this specification is restricted to this specification and does not grant rights of use for referred documents.
Right of use for this specification will be granted without cost.
This document may be distributed through computer systems, printed or copied as long as the content remains unchanged and the document is not modified.
OPC Foundation and PROFIBUS Nutzerorganisation e.V. do not guarantee usability for any purpose and shall not be made liable for any case using the content of this document.
The user of the document agrees to indemnify OPC Foundation and PROFIBUS Nutzerorganisation e.V. and their officers, directors and agents harmless from all demands, claims, actions, losses, damages (including damages from personal injuries), costs and expenses (including attorneys' fees) which are in any way related to activities associated with its use of content from this specification.
The document shall not be used in conjunction with company advertising, shall not be sold or licensed to any party.
The intellectual property and copyright is solely owned by the OPC Foundation and PROFIBUS Nutzerorganisation e.V..
PATENTS
The attention of adopters is directed to the possibility that compliance with or adoption of OPC or PROFIBUS Nutzerorganisation e.V. specifications may require use of an invention covered by patent rights. OPC Foundation or PROFIBUS Nutzerorganisation e.V. shall not be responsible for identifying patents for which a license may be required by any OPC or PROFIBUS Nutzerorganisation e.V. specification, or for conducting legal inquiries into the legal validity or scope of those patents that are brought to its attention. OPC or PROFIBUS Nutzerorganisation e.V. specifications are prospective and advisory only. Prospective users are responsible for protecting themselves against liability for infringement of patents.
WARRANTY AND LIABILITY DISCLAIMERS
WHILE THIS PUBLICATION IS BELIEVED TO BE ACCURATE, IT IS PROVIDED "AS IS" AND MAY CONTAIN ERRORS OR MISPRINTS. THE OPC FOUDATION NOR PROFIBUS Nutzerorganisation e.V. MAKES NO WARRANTY OF ANY KIND, EXPRESSED OR IMPLIED, WITH REGARD TO THIS PUBLICATION, INCLUDING BUT NOT LIMITED TO ANY WARRANTY OF TITLE OR OWNERSHIP, IMPLIED WARRANTY OF MERCHANTABILITY OR WARRANTY OF FITNESS FOR A PARTICULAR PURPOSE OR USE. IN NO EVENT SHALL THE OPC FOUNDATION NOR PROFIBUS Nutzerorganisation e.V. BE LIABLE FOR ERRORS CONTAINED HEREIN OR FOR DIRECT, INDIRECT, INCIDENTAL, SPECIAL, CONSEQUENTIAL, RELIANCE OR COVER DAMAGES, INCLUDING LOSS OF PROFITS, REVENUE, DATA OR USE, INCURRED BY ANY USER OR ANY THIRD PARTY IN CONNECTION WITH THE FURNISHING, PERFORMANCE, OR USE OF THIS MATERIAL, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGES.
The entire risk as to the quality and performance of software developed using this specification is borne by you.
RESTRICTED RIGHTS LEGEND
This Specification is provided with Restricted Rights. Use, duplication or disclosure by the U.S. government is subject to restrictions as set forth in (a) this Agreement pursuant to DFARs 227.7202-3(a); (b) subparagraph (c)(1)(i) of the Rights in Technical Data and Computer Software clause at DFARs 252.227-7013; or (c) the Commercial Computer Software Restricted Rights clause at FAR 52.227-19 subdivision (c)(1) and (2), as applicable. Contractor / manufacturer are the OPC Foundation, 16101 N. 82nd Street, Suite 3B, Scottsdale, AZ, 85260-1830.
COMPLIANCE
The combination of PROFIBUS Nutzerorganisation e.V. and OPC Foundation shall at all times be the sole entities that may authorize developers, suppliers and sellers of hardware and software to use certification marks, trademarks or other special designations to indicate compliance with these materials as specified within this document. Products developed using this specification may claim compliance or conformance with this specification if and only if the software satisfactorily meets the certification requirements set by PROFIBUS Nutzerorganisation e.V. or the OPC Foundation. Products that do not meet these requirements may claim only that the product was based on this specification and must not claim compliance or conformance with this specification.
Trademarks
Most computer and software brand names have trademarks or registered trademarks. The individual trademarks have not been listed here.a
| GENERAL PROVISIONS |
Should any provision of this Agreement be held to be void, invalid, unenforceable or illegal by a court, the validity and enforceability of the other provisions shall not be affected thereby.
This Agreement shall be governed by and construed under the laws of Germany.
This Agreement embodies the entire understanding between the parties with respect to, and supersedes any prior understanding or agreement (oral or written) relating to, this specification.