
7.3 FrequencyDriveAxisType
A FrequencyDriveAxisType is a DriveAxisType with a frequency command interface. Figure 20 shows a block diagram demonstrating the basic organization and control flow for this axis type. If the Drive is a PROFIdrive, the FrequencyDriveAxisType is used to represent AC1 Drive Objects using a frequency command interface.
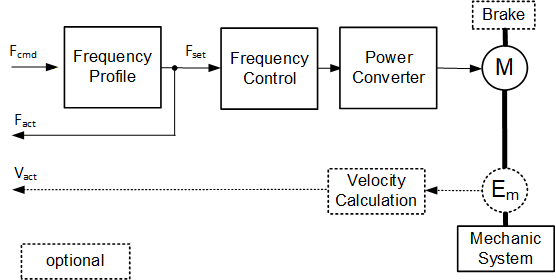
Figure 21 shows the components added by the FrequencyDriveAxisType ObjectType to the DriveAxisType it is derived from.
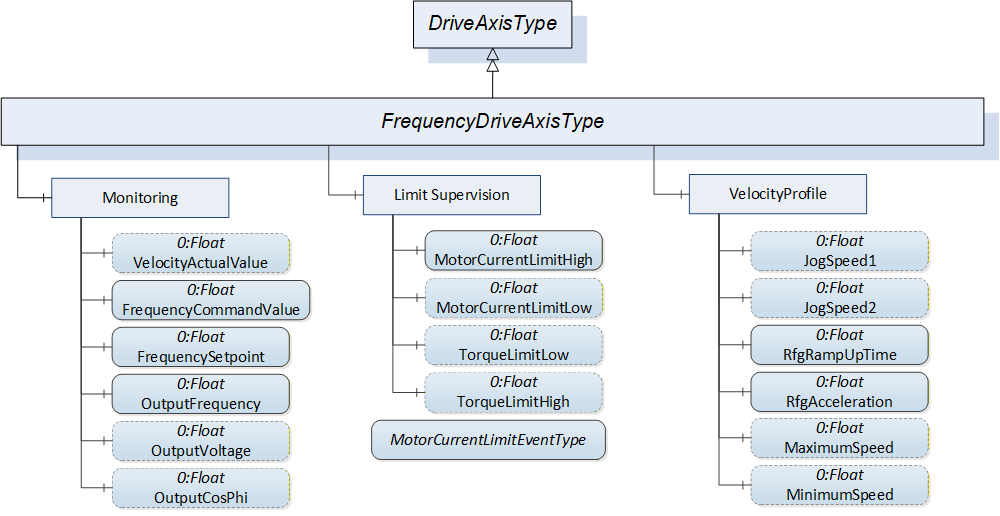
The formal definition of the FrequencyDriveAxisType ObjectType can be found in Table 20.
| Attribute | Value | ||||
| BrowseName | FrequencyDriveAxisType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of the DriveAxisType. | |||||
| 0:GeneratesEvent | ObjectType | MotorCurrentLimitEventType | |||
| Conformance Units | |||||
|---|---|---|---|---|---|
| PDRV Measurement | |||||
The components of the FrequencyDriveAxisType have additional subcomponents which are defined in Table 21.
| BrowsePath | References | NodeClass | BrowseName | DataType | TypeDefinition | Others |
| Monitoring | 0:HasComponent | Variable | FrequencyCommandValue | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | VelocityActualValue | 0:Float | 0:AnalogUnitType | O, RO |
| Monitoring | 0:HasComponent | Variable | FrequencySetpoint | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | OutputFrequency | 0:Float | 0:AnalogUnitType | M, RO |
| Monitoring | 0:HasComponent | Variable | OutputVoltage | 0:Float | 0:AnalogUnitType | O, RO |
| Monitoring | 0:HasComponent | Variable | OutputCosPhi | 0:Float | 0:BaseAnalogType | O, RO |
| LimitSupervision | 0:HasComponent | Variable | MotorCurrentLimitHigh | 0:Float | 0:AnalogUnitType | M, RO |
| LimitSupervision | 0:HasComponent | Variable | MotorCurrentLimitLow | 0:Float | 0:AnalogUnitType | O, RO |
| LimitSupervision | 0:HasComponent | Variable | TorqueLimitLow | 0:Float | 0:AnalogUnitType | O, RO |
| LimitSupervision | 0:HasComponent | Variable | TorqueLimitHigh | 0:Float | 0:AnalogUnitType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | JogSpeed1 | 0:Float | 0:AnalogUnitType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | JogSpeed2 | 0:Float | 0:AnalogUnitType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | RfgRampUpTime | 0:Float | 0:AnalogUnitType | M, RO |
| VelocityProfile | 0:HasComponent | Variable | RfgAcceleration | 0:Float | 0:AnalogUnitType | M, RO |
| VelocityProfile | 0:HasComponent | Variable | MinimumVelocity | 0:Float | 0:AnalogUnitType | O, RO |
| VelocityProfile | 0:HasComponent | Variable | MaximumVelocity | 0:Float | 0:AnalogUnitType | O, RO |