
8 OperationType
8.1 OperationType definition
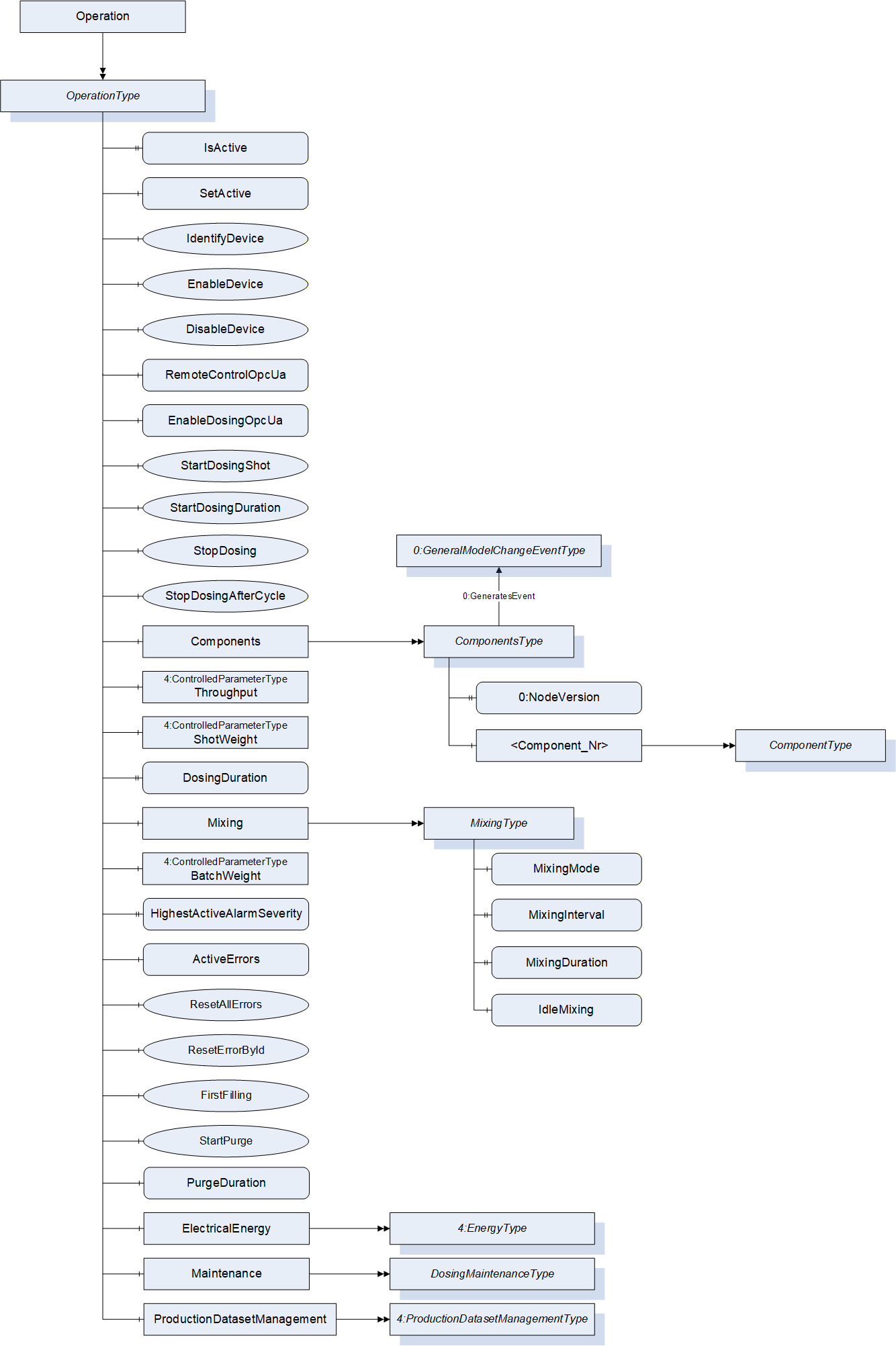
The OperationType contains objects which are necessary to operate the DosingSystem. It is formally defined in Table 4. The top level of the OperationType describes the whole dosing system while detailed information about the single components can be found in the ComponentsType Object.
| Attribute | Value | ||||
| BrowseName | OperationType | ||||
| IsAbstract | False | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Other |
|---|---|---|---|---|---|
| Subtype of 0:BaseObjectType defined in OPC 10000-5 | |||||
| 0:HasProperty | Variable | IsActive | 0:Boolean | 0:PropertyType | O, RO |
| 0:HasComponent | Variable | SetActive | 0:Boolean | 0:BaseDataVariableType | O, RW |
| 0:HasComponent | Method | IdentifyDevice | O | ||
| 0:HasComponent | Method | EnableDevice | M | ||
| 0:HasComponent | Method | DisableDevice | M | ||
| 0:HasComponent | Variable | RemoteControlOpcUa | 0:Boolean | 0:BaseDataVariableType | M |
| 0:HasComponent | Variable | EnableDosingOpcUa | 0:Boolean | 0:BaseDataVariableType | M |
| 0:HasComponent | Method | StartDosingShot | O | ||
| 0:HasComponent | Method | StartDosingContinuous | O | ||
| 0:HasComponent | Method | StopDosing | O | ||
| 0:HasComponent | Method | StopDosingAfterCycle | O | ||
| 0:HasComponent | Object | Components | ComponentsType | M | |
| 0:HasComponent | Object | Throughput | 4:ControlledParameterType | O | |
| 0:HasComponent | Object | ShotWeight | 4:ControlledParameterType | O | |
| 0:HasComponent | Variable | DosingDuration | 0:Duration | 0:BaseDataVariableType | O, RW |
| 0:HasComponent | Object | Mixing | MixingType | O | |
| 0:HasComponent | Object | BatchWeight | 4:ControlledParameterType | O | |
| 0:HasProperty | Variable | HighestActiveAlarmSeverity | 0:UInt16 | 0:PropertyType | M, RO |
| 0:HasComponent | Variable | ActiveErrors | 4:ActiveErrorDataType[] | 0:BaseDataVariableType | M, RO |
| 0:HasComponent | Method | ResetAllErrors | O | ||
| 0:HasComponent | Method | ResetErrorById | O | ||
| 0:HasComponent | Method | FirstFilling | O | ||
| 0:HasComponent | Method | StartPurge | O | ||
| 0:HasComponent | Variable | PurgeDuration | 0:Duration | 0:BaseDataVariableType | O |
| 0:HasComponent | Object | ElectricalEnergy | 4:EnergyType | O | |
| 0:HasComponent | Object | Maintenance | DosingMaintenanceType | O | |
| 0:HasComponent | Object | ProductionDataSetManagement | 4:ProductionDatasetManagementType | O | |
| Conformance Units | |||||
|---|---|---|---|---|---|
| OPC 40082-4 Basic |
8.2 IsActive
The IsActive Property provides information if the dosing unit is active in the current production.
8.3 SetActive
The SetActive variable activates the dosing unit for the current production.
NOTE: Malfunction or activation by mistake should be covered on machine side (not part of this specification).
8.4 IdentifyDevice
The DosingSystem on which this method is called shows itself by e.g. activation of a LED.
Signature: IdentifyDevice();| Attribute | Value | ||||
| BrowseName | IdentifyDevice | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Modelling Rule |
|---|
NOTE: This Method is identical to the IdentifyDevice Method in OPC 40082-1.
8.5 EnableDevice
Enables the device, for example activate motor drives. Triggers the transition from MachineryItemState NotAvailable to NotExecuting.
Signature: EnableDevice();| Attribute | Value | ||||
| BrowseName | EnableDevice | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Modelling Rule |
|---|
8.6 DisableDevice
Disables the device, for example deactivate motor drives. Triggers the transition from any MachineryItemState to NotAvailable.
Signature: DisableDevice();| Attribute | Value | ||||
| BrowseName | DisableDevice | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Modelling Rule |
|---|
8.7 RemoteControlOpcUa
Variable to set and read the actual remote control state of the server instance. If RemoteControlOpcUa is FALSE, the interface is read-only (Variables not writeable, methods not executable).
RemoteControlOpcUa remains writeable, even if set to FALSE.
8.8 EnableDosingOpcUa
Variable to set and read the actual state how the dosing signal is transferred from the client to the dosing system in addition to RemoteControlOpcUa.
If EnableDosingOpcUa is FALSE, dosing has to be triggered by another interface, e.g. hard-wired signals.
If RemoteControlOpcUa is FALSE, EnableDosingOpcUa shall be ignored.
8.9 StartDosingShot
If EnableDosingOpcUa is TRUE, this method can be used to start dosing for one shot with a defined duration specified by DosingDuration, no arguments.
If EnableDosingOpcUa is FALSE, the return statement shall be "Bad_InvalidState"
In case of inline dosing in a cyclic production process, this method needs to be called every cycle.
Signature
StartDosingShot();| Attribute | Value | ||||
| BrowseName | StartDosingShot | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Modelling Rule |
|---|
If StartDosingShot is used, DosingDuration becomes mandatory.
8.10 StartDosingContinuous
If EnableDosingOpcUa is TRUE, this method can be used to start dosing continuously, no arguments.
If EnableDosingOpcUa is FALSE, the return statement shall be "Bad_InvalidState"
Signature
StartDosingContinuous();| Attribute | Value | ||||
| BrowseName | StartDosingContinuous | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Modelling Rule |
|---|
8.11 StopDosing
Method to stop dosing immediately. No arguments.
Signature
StopDosing();| Attribute | Value | ||||
| BrowseName | StopDosing | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Modelling Rule |
|---|
8.12 StopDosingAfterCycle
Method to stop dosing after the current dosing cycle (e.g. to get a valid batch mix with batch blending). No arguments.
Signature
StopDosingAfterCycle();| Attribute | Value | ||||
| BrowseName | StopDosingAfterCycle | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Modelling Rule |
|---|
8.13 Components
This ObjectType is a container for all Components in the DosingSystem. The ComponentsType is described in chapter 11.
8.14 Throughput
Current throughput of the DosingSystem in mass or volume per time. The modelling rule for this node is optional to cover pure feeders, but is mandatory for all other dosing units.
Unit: kg/h or lb/h
8.15 ShotWeight
Current shotweight of the parts produced by the production machine in mass.
Unit: g or oz
8.16 DosingDuration
Used for inline dosing where the dosing device is mounted on the feed throat of the production machine. This parameter defines the duration the dosing shall be active after receiving the StartDosingShot signal.
If DosingDuration is used, the dosing device shall stop dosing after the duration. StopDosing or StopDosingAfterCycle are not necessary in this case but shall have a higher priority if used anyway.
8.17 Mixing
In case the dosing station is equipped with an active mixing device like a batch blender, this object provides information about the mixing process. The MixingType is defined in chapter 9.
8.18 BatchWeight
Target batch weight for batch blenders in absolute values.
Unit: g or oz
8.19 HighestActiveAlarmSeverity
| Description: | Indication of the severity of the highest active alarm (0 = no active alarm - 1000 = possible error). Together with ActiveErrors, it provides a minimal error handling for devices without alarm support. However, the variable shall be filled even if alarms are supported. |
| The severity classification defined in OPC 40083 (clause 6.4) shall be used. | |
| Example: | 400 |
8.20 ActiveErrors
| Description: | List of the active errors of the device. It provides a minimal error handling for devices without alarm support. However, the variable shall be filled even if alarms are supported. The ActiveErrorDataType is defined in OPC 40083. If there is no active error, the array is empty. |
8.21 ResetAllErrors
| Description: | Method to reset all errors of the device. |
Signature
ResetAllErrors();8.22 ResetErrorById
| Description: | Method to reset one error of the device. |
Signature
ResetErrorById(
[in] String Id);| Argument | Description |
| Id | Id of the error, listed in ActiveErrors, that shall be reset. |
| Attribute | Value | ||||
| BrowseName | ResetErrorById | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Modelling Rule |
|---|---|---|---|---|---|
| HasProperty | Variable | InputArguments | Argument[] | PropertyType | Mandatory |
8.23 FirstFilling
Method to fill the DosingSystem for the first time with the mixture of materials from the current recipe.
No Arguments.
Signature: FirstFilling();
| Attribute | Value | ||||
| BrowseName | FirstFilling | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Modelling Rule |
|---|
8.24 StartPurge
Method to start the purging function on the dosing system. No arguments.
Once purging, the State of all components will be set to "Purging" and can be used to monitor if the purging sequence has finished.
Signature
StartPurge();| Attribute | Value | ||||
| BrowseName | StartPurge | ||||
| References | Node Class | BrowseName | DataType | TypeDefinition | Modelling Rule |
|---|
8.25 PurgeDuration
Duration of the purging function of the dosing system.
8.26 ElectricalEnergy
Information about the electrical power and energy consumption of the DosingSystem. The EnergyType is defined in OPC 40083.
8.27 Maintenance
Information on the maintenance status of the dosing system. The DosingMaintenanceType is defined in chapter 16.
8.28 ProductionDatasetManagement
The ProductionDatasetManagementType is defined in OPC 40083 and provides functionalities for the management of recipes/machine settings.