
4.1 Introduction to PROFINET Encoder
4.1.1 Encoder Model
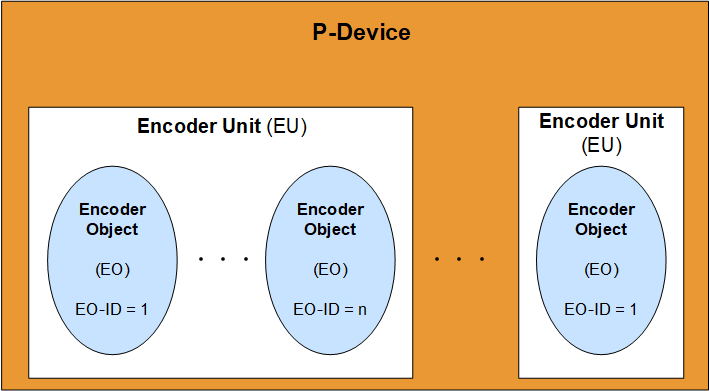
The Encoder Model is derived from the PROFIdrive Drive Model as defined in [PDP]. The Encoder Profile defined in [ENCP] used as basis for this specification defines that a P-Device contains exactly one or multiple Encoder Units containing exactly one or multiple Encoder Objects (See Figure 1).
4.1.2 Encoder Object
The main functions of a PROFINET Encoder are defined by the Encoder Object (EO). The general architecture of an Encoder Object is shown in Figure 2.
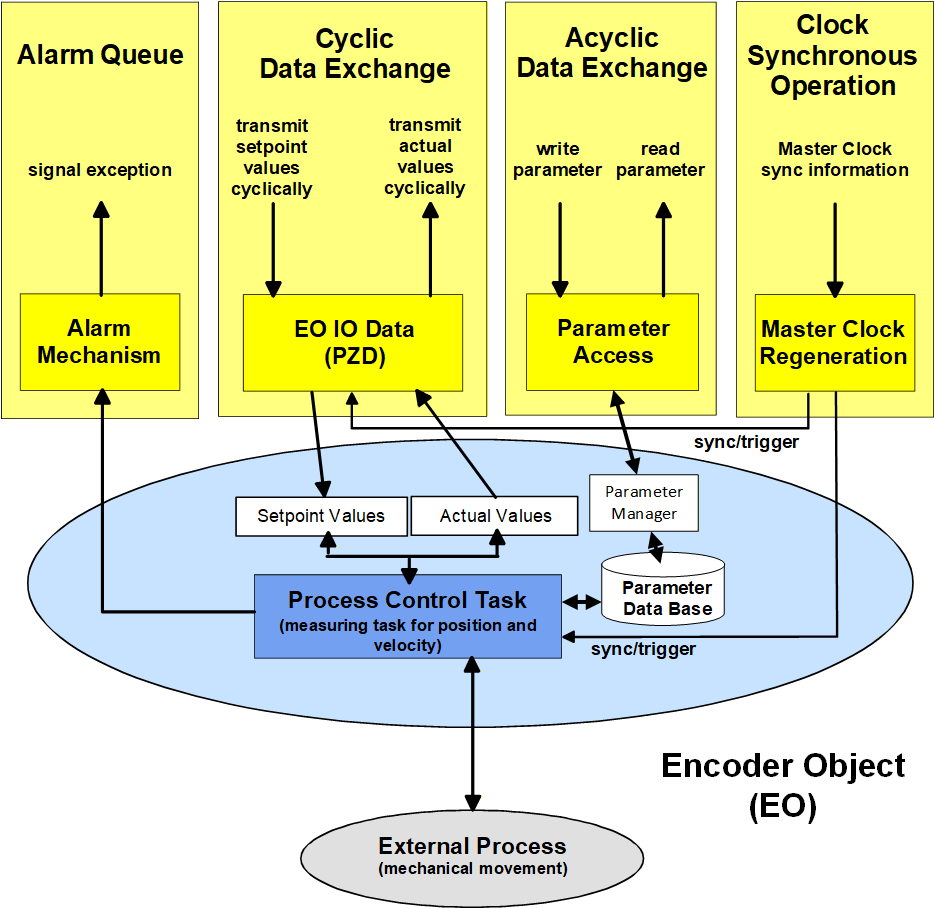
As defined in [ENCP], the EO shall have the following minimum functionality:
Parameters
Measuring task
IO Data (setpoint values, actual values)
Support for diagnosis mechanism
Clock synchronous operation
Fault buffer
The OPC UA for PROFINET Encoder Information Model provides access to parameters, IO Data, diagnosis, and fault buffer information.
4.1.3 Encoder Communication Model
The communication channels available between the P-Device and other Devices are shown in Figure 3.
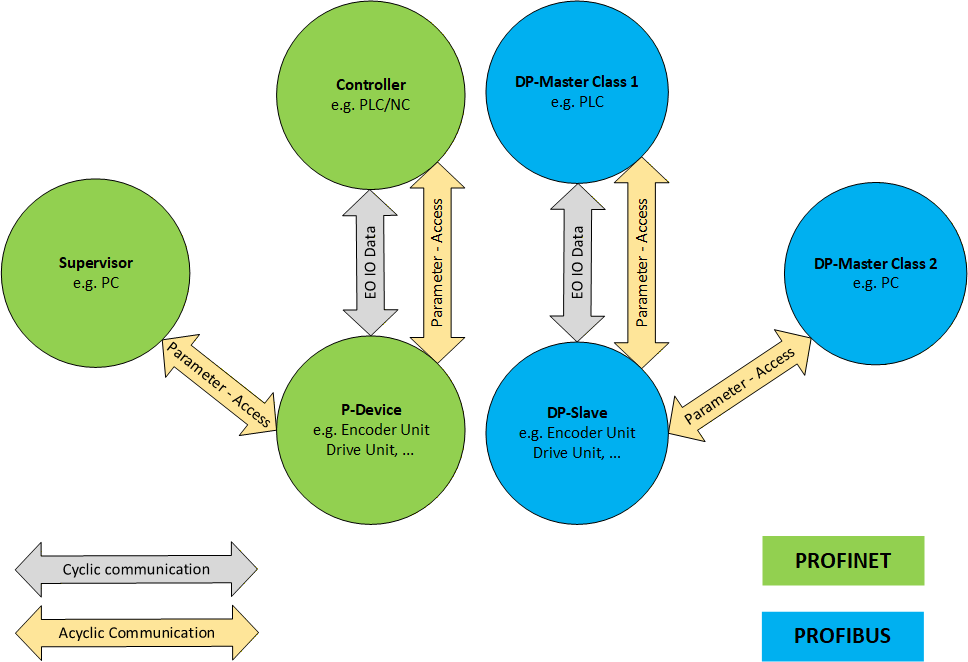
The Encoder Profile defined in [ENCP] allows two communication interfaces for Encoder devices: PROFIBUS or PROFINET. This specification applies to Encoder devices using different communication protocols also. PROFINET specific parts of the Information Model are optional.