
E.1 Example of subtyping SpatialLocationType using the RSL concept
For the use of the RSL concept it is needed to create a subtype of SpatialLocationType (7.2). Very common in use in factory automation is to use cartesian positions and euler angles to describe relative spatial relationships, as defined by CartesianFrameAngleOrientationType (7.3).
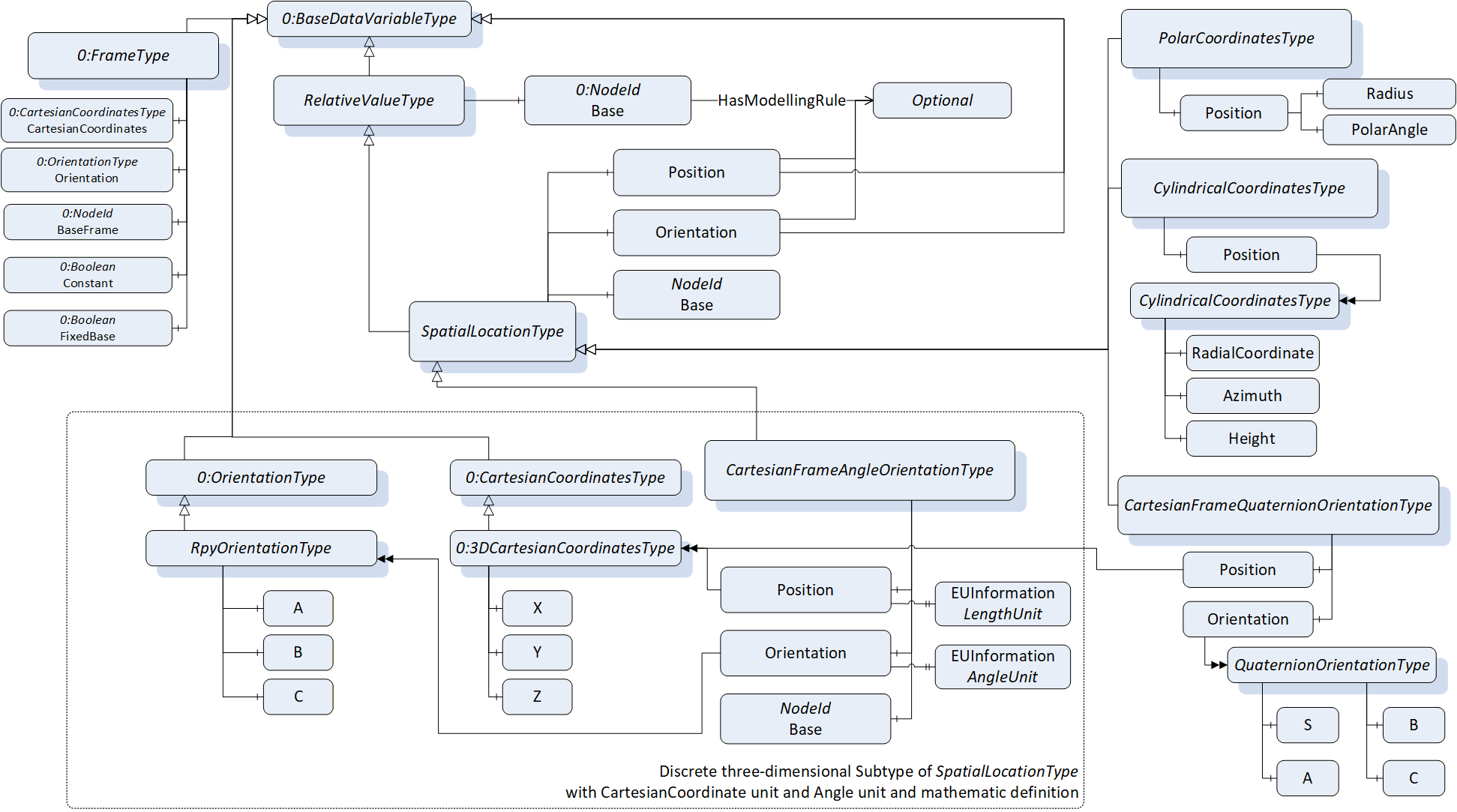
To describe relative spatial relationships another format or math might be needed to represent a position (e.g., in polar or cylindrical coordinates) or an orientation (e.g., in quaternion).
Figure 25 shows exemplary how other specific subtypes of SpatialLocationType (7.2) can be created. For example, a CartesianFrameQuaternionOrientationType, which can use the Variable Position in the same way the CartesianFrameAngleOrientationType uses it and describes Orientation with Quaternion. Or for representations without orientation only Types which provide a Position (e.g. the CylindricalCoordinatesFrameType or the PolarCoordinatesFrameType).
By describing a ConformanceUnit (similar to the CartesianFrameAngleOrientationType ConformanceUnit) for a created subtype of SpatialLocationType and combining this with ConformanceUnits of the RSL concept, as defined in the RSL CartesianFrameAngleOrientation Profile (9.2.2.2), new Profiles can be created to represent spatial relationships in other formats.