The HaulageMachineType provides a representation of haulage machines and is a subtype of the MiningEquipmentType as shown in Figure 1. Importantly, it is composed of a ParameterSet and MethodSet Object instance declaration to cover all relevant parameters of the equipment. Intended to be used as an AddIn, as defined in OPC 10001-7, this ObjectType can serve as a type definition of an Object instance declaration called HaulingMachine.
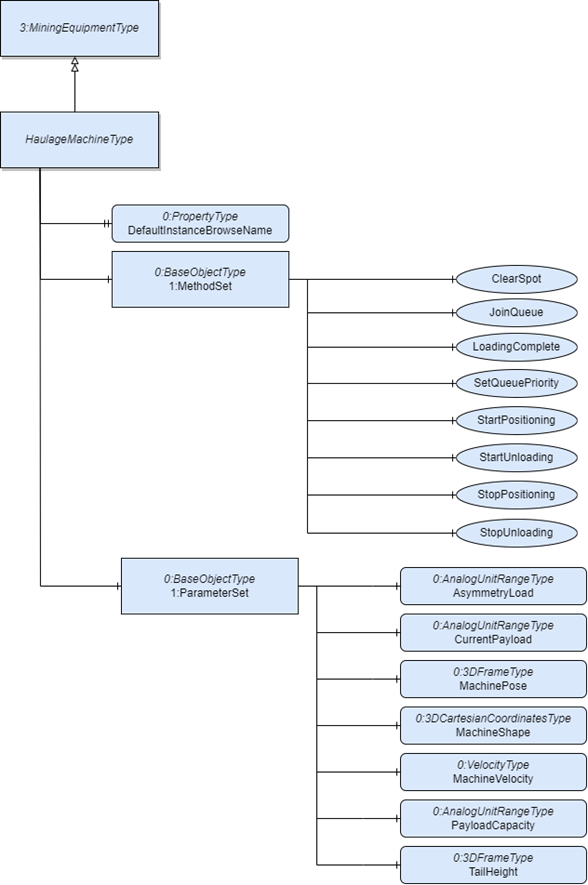
Figure 1 – Overview HaulageMachineType
The HaulageMachineType is formally defined in Table 2.
Table 2 – HaulageMachineType Definition
|
Attribute |
Value |
||||
|
BrowseName |
HaulageMachineType |
||||
|
IsAbstract |
False |
||||
|
References |
Node Class |
BrowseName |
DataType |
TypeDefinition |
Other |
|
Subtype of the MiningEquipmentType defined in OPC 40560, i.e. inheriting the InstanceDeclarations of that Node. |
|||||
|
0:HasProperty |
Variable |
DefaultInstanceBrowseName |
0:QualifiedName |
0:PropertyType |
|
|
0:HasComponent |
Object |
2:MethodSet |
|
0:BaseObjectType |
O |
|
0:HasComponent |
Object |
2:ParameterSet |
|
0:BaseObjectType |
O |
|
Conformance Units |
|||||
|
Transport and Dumping General Functional Variables |
|||||
|
Transport and Dumping General Methods |
|||||
The components of the HaulingMachineType have Subcomponents which are defined in Table 3.
Table 3 – HaulageMachineType Subcomponents
|
BrowsePath |
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
Others |
|
2:MethodSet |
0:HasComponent |
Method |
ClearSpot |
|
|
O |
|
2:MethodSet |
0:HasComponent |
Method |
JoinQueue |
|
|
O |
|
2:MethodSet |
0:HasComponent |
Method |
LoadingComplete |
|
|
O |
|
2:MethodSet |
0:HasComponent |
Method |
SetQueuePriority |
|
|
O |
|
2:MethodSet |
0:HasComponent |
Method |
StartPositioning |
|
|
O |
|
2:MethodSet |
0:HasComponent |
Method |
StartUnloading |
|
|
O |
|
2:MethodSet |
0:HasComponent |
Method |
StopPositioning |
|
|
O |
|
2:MethodSet |
0:HasComponent |
Method |
StopUnloading |
|
|
O |
|
2:ParameterSet |
0:HasComponent |
Variable |
AsymmetryLoad |
0:Double |
0:AnalogUnitRangeType |
O, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
MachinePose |
0:3DFrame |
0:3DFrameType |
O, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
MachineShape |
0:3DCartesianCoordinates[] |
0:3DCartesianCoordinatesType |
O, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
PayloadCapacity |
0:Double |
0:AnalogUnitRangeType |
O, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
TailHeight |
0:3DFrame |
0:3DFrameType |
O, RO |
The components of the HaulageMachineType have additional Attributes which are defined in Table 4.
Table 4 – HaulageMachineType Attribute values for child Nodes
|
BrowsePath |
Value Attribute |
Description Attribute |
|||
|
NamespaceUri: http://www.opcfoundation.org/UA/units/un/cefact UnitId: 5525061 DisplayName: t Description: tonne (metric ton) |
This is the EngineeringUnit of the current payload. |
|||
|
High: 200Low: 0 |
This is the EURange of the current payload. |
|||
|
NamespaceUri: http://www.opcfoundation.org/UA/units/un/cefact UnitId: 5525061 DisplayName: t Description: tonne (metric ton) |
This is the EngineeringUnit of the payload capacity. |
|||
|
High: 200Low: 0 |
This is the EURange of the payload capacity. |
|||
|
NamespaceUri: http://www.opcfoundation.org/UA/units/un/cefact UnitId: 20529 DisplayName: % Description: percent |
This is the EngineeringUnit of the asymmetric load indicator. |
|||
|
High: 100Low: 0 |
This is the EURange of the asymmetric load indicator. |
The signature of this Method is specified below. The following table specifies specify the Arguments and AddressSpace representation, respectively.
Signature
ClearSpot(
[out] 0:Boolean ClearSpotAcknowledged );
Table 5 – ClearSpot Method Arguments
|
Argument |
Description |
|
ClearSpotAcknowledged |
The ClearSpotAcknowledged property describes the acknowledging of a clear spot for the equipment within the queue. True – OK False – ClearError – Spot could not be cleared |
Table 6 – ClearSpot Method AddressSpace definition
|
Attribute |
Value |
||||
|
BrowseName |
ClearSpot |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
0:HasProperty |
Variable |
0:OutputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
The signature of this Method is specified below. The following table specifies specify the Arguments and AddressSpace representation, respectively.
Signature
JoinQueue(
[in] 0:UInt16 QueuePriority,
[out] 0:Boolean JoinQueueAcknowledged );
Table 7 – JoinQueue Method Arguments
|
Argument |
Description |
|
QueuePriority |
The QueuePriority property describes the priority of the hauling machine within a waiting queue. |
|
JoinQueueAcknowledged |
The JoinQueueAcknowledged property describes the acknowledging of the equipment to join the queue. True – OK False – JoinError – Queue could not be joined |
Table 8 – JoinQueue Method AddressSpace definition
|
Attribute |
Value |
||||
|
BrowseName |
JoinQueue |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
0:HasProperty |
Variable |
0:InputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
|
0:HasProperty |
Variable |
0:OutputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
The signature of this Method is specified below. The following table specifies specify the Arguments and AddressSpace representation, respectively.
Signature
LoadingComplete(
[out] 0:Boolean LoadingCompleteAcknowledged );
Table 9 – LoadingComplete Method Arguments
|
Argument |
Description |
|
LoadingCompleteAcknowledged |
The LoadingCompleteAcknowledged property describes the acknowledging of the loading completion. True – OK False – LoadingError – Loading could not be completed |
Table 10 – LoadingComplete Method AddressSpace definition
|
Attribute |
Value |
||||
|
BrowseName |
LoadingComplete |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
0:HasProperty |
Variable |
0:OutputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
The signature of this Method is specified below. The following table specifies specify the Arguments and AddressSpace representation, respectively.
Signature
SetQueuePriority(
[in] 0:Boolean QueuePriority,
[out] 0:Boolean SetPriorityAcknowledged );
Table 11 – SetQueuePriority Method Arguments
|
Argument |
Description |
|
QueuePriority |
The QueuePriority property describes the priority of the hauling machine within a waiting queue. |
|
SetPriorityAcknowledged |
The SetPriorityAcknowledged property describes the acknowledging of the set priority for the equipment. True – OK False – SetError – Priority could not be set. |
Table 12 – SetQueuePriority Method AddressSpace definition
|
Attribute |
Value |
||||
|
BrowseName |
SetQueuePriority |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
0:HasProperty |
Variable |
0:InputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
|
0:HasProperty |
Variable |
0:OutputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
The signature of this Method is specified below. The following table specifies specify the Arguments and AddressSpace representation, respectively.
Signature
StartPositioning(
[in] 0:3DFrame TargetPose,
[out] 0:Boolean PositioningStartAcknowledged );
Table 13 – StartPositioning Method Arguments
|
Argument |
Description |
|
TargetPose |
The TargetPose property describe the coordinates and orientation a haulage machine should navigate to in order to position itself for loading. |
|
PositioningStartAcknowledged |
The PositioningStartAcknowledged property describes the acknowledging of the started positioning command for the equipment. True – OK False – StartError – Positioning could not be started. |
Table 14 – StartPositioning Method AddressSpace definition
|
Attribute |
Value |
||||
|
BrowseName |
StartPositioning |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
0:HasProperty |
Variable |
0:InputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
|
0:HasProperty |
Variable |
0:OutputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
The signature of this Method is specified below. The following table specifies the Arguments and AddressSpace representation, respectively.
Signature
StartUnloading(
[out] 0:Boolean UnloadingStartAcknowledged );
Table 15 – StartUnloading Method Arguments
|
Argument |
Description |
|
UnloadingStartAcknowledged |
The UnloadingStartAcknowledged property describes the acknowledging of the starting unloading command. True – OK False – StartError – Unloading could not be started. |
Table 16 – StartUnloading Method AddressSpace definition
|
Attribute |
Value |
||||
|
BrowseName |
StartUnloading |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
0:HasProperty |
Variable |
0:OutputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
The signature of this Method is specified below. The following table specifies the Arguments and AddressSpace representation, respectively.
Signature
StopPositioning(
[out] 0:Boolean PositioningStopAcknowledged );
Table 17 – StopPositioning Method Arguments
|
Argument |
Description |
|
PositioningStopAcknowledged |
The PositioningStopAcknowledged property describes the acknowledging of the stopping positioning command. True – OK False – StopError – Positioning could not be stoped. |
Table 18 – StopPositioning Method AddressSpace definition
|
Attribute |
Value |
||||
|
BrowseName |
StopPositioning |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
0:HasProperty |
Variable |
0:OutputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
The signature of this Method is specified below. The following table specifies the Arguments and AddressSpace representation, respectively.
Signature
StopUnloading(
[out] 0:Boolean UnloadingStopAcknowledged );
Table 19 – StopUnloading Method Arguments
|
Argument |
Description |
|
UnloadingStopAcknowledged |
The UnloadingStopAcknowledged property describes the acknowledging of the stopping unloading command. True – OK False – StopError – Unloading could not be stoped. |
Table 20 – StopUnloading Method AddressSpace definition
|
Attribute |
Value |
||||
|
BrowseName |
StopUnloading |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
0:HasProperty |
Variable |
0:OutputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
The ClearSpot method call indicates the clearing of the spot within the queue.
The JoinQueue method call indicates the joining of the waiting/spotting queue of the hauling machine.
The LoadingComplete method call indicates the completion of the loading process.
The SetQueuePriority method call sets the queue priority of the hauling machine.
The StartPositioning method call indicates the start of the positioning process.
The StartUnloading method call indicates the start of the unloading process.
The StopPositioning method call indicates the end of the positioning process.
The StopUnloading method call indicates the end of the unloading process.
The AsymmetryLoad variable describes the asymmetry of the load on the truck-bed.
The CurrentPayload variable describes the current payload of the hauling machine.
The MachinePose variable describes the pose of the hauling machine in terms of location coordinates, orientation and (optional) base frame.
The MachineShape variable describes the hauling machine’s shape in terms of width, height and length. As this variable is an array, it can contain multiple shapes such as a shape for the truck-bed or for the cabin.
The MachineVelocity variable describes the hauling machine’s velocity in terms of magnitude and direction.
The PayloadCapacity variable describes the payload capacity of the hauling machine.
The TailHeight variable measures the tail height of the hauling machine.