
8 Safety communication layer management
8.1 General
This chapter gives details about the management of the safety communication layer.
8.2 Safety function response time part of communication
For cyclic communication, the part of the safety function response time attributable to a safety communication according to this document (SFRTOPCSafety) is specified in Formula (1).
Calculation of safety function response time part of OPC UA safety
| SFRTOPCSafety <= 2 × SafetyConsumerTimeout + ConsumerCycleTime | (1) |
where
SFRTOPCSafety: Part of the safety function response time attributable to the safety communication according to this document.
SafetyConsumerTimeout: Watchdog timer running in the SafetyConsumer. It is started immediately before a new RequestSPDU is sent (T14 or T28). If the timer runs out a timeout error is triggered (T18 or T29).
ConsumerCycleTime: The maximum time for the cyclic execution of the SafetyConsumer, see 7.2.2.2.
If multiple safety connections according to this document are used within a safety function in series, their respective attributions to the SFRT shall be summed up.
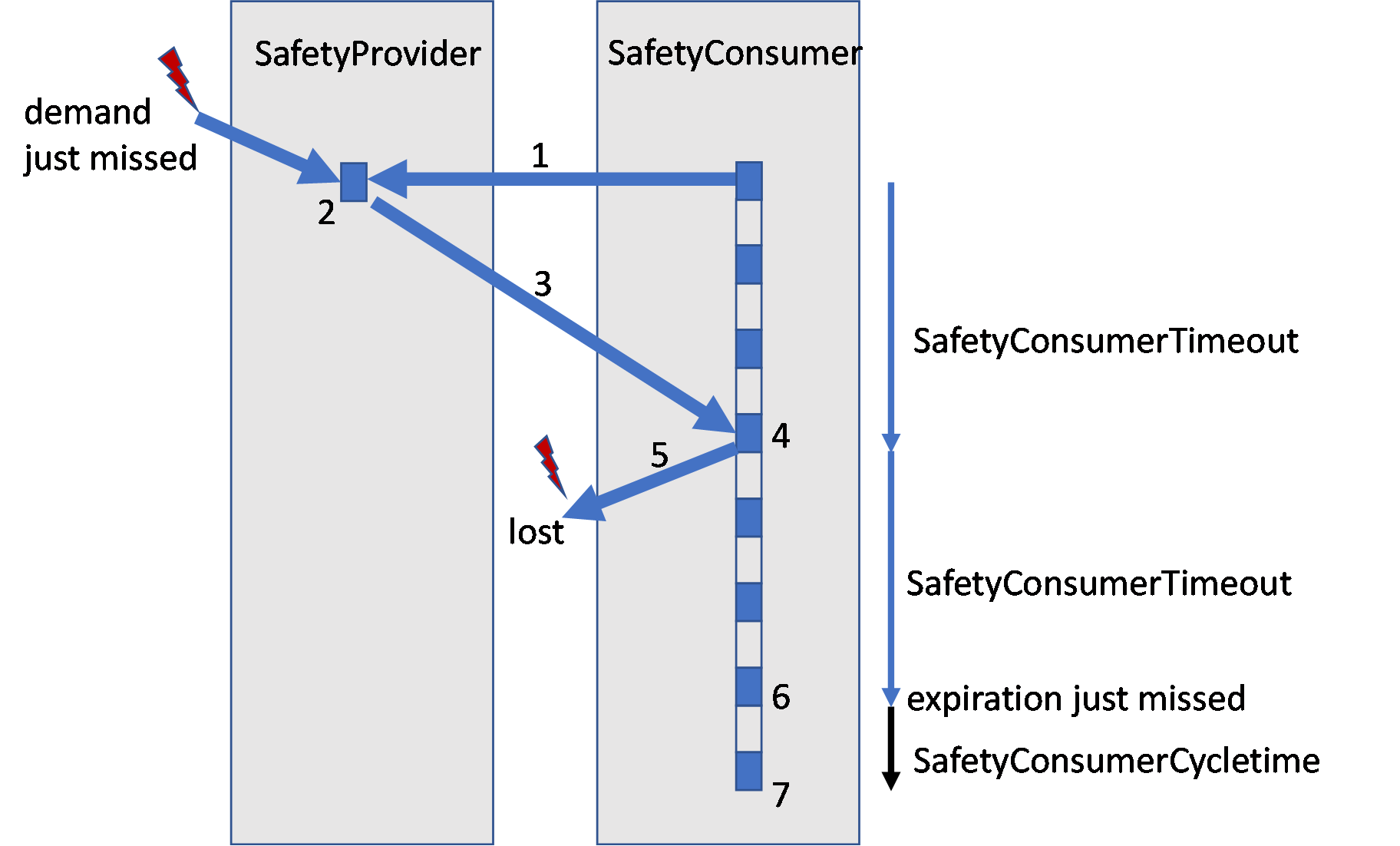
Formula (1) is justified by Figure 25 and the following explanation:
The SafetyConsumer sends a RequestSPDU. At about the same time, a dangerous event occurs at the SafetyProvider, demanding the safety function to trigger.
However, in the worst case, the RequestSPDU is processed at the SafetyProvider just before the dangerous event becomes known.
Hence, the ResponseSPDU does not yet contain any information about the dangerous event.
In the worst case, the ResponseSPDU is processed in the SafetyConsumer just before the SafetyConsumerTimeout expires.
An error leads to a loss or unacceptable delay of either the RequestSPDU or the ResponseSPDU.
Hence, the SafetyConsumerTimeout expires.
In the worst case, the timer expires immediately after it was checked. Hence, it takes another cycle of the SafetyConsumer to detect the error.
SafetyConsumerTimeout is a parameter of the SafetyConsumer. ConsumerCycleTime depends on the maximum sample time of the SafetyConsumer application. At commissioning, the integrator should be advised to design it shorter than a quarter of the target SFRTOPCSafety. If the watchdog time SafetyConsumerTimeout is too small, spurious trips can occur. To avoid this, SafetyConsumerTimeout should be chosen as shown in Formula (2).
Selection of the watchdog parameter SafetyConsumerTimeout
| SafetyConsumerTimeout >= T_CD_RequestSPDU + SafetyProviderDelay + T_CD_ResponseSPDU + SafetyConsumerDelay | (2) |
where
T_CD_RequestSPDU: The worst-case communication delay for the RequestSPDU.
T_CD_ResponseSPDU: The worst-case communication delay for the ResponseSPDU.
SafetyProviderDelay: The worst-case SafetyProvider delay.
Typically, one scan time period of the SafetyProvider.SafetyConsumerDelay: The worst-case SafetyConsumer delay.
Typically, one scan time period of the SafetyConsumer.
[RQ8.1] To support the calculation of SafetyConsumerTimeout the SafetyProvider shall provide the SafetyProviderDelay as a Variable in the OPC UA Information Model, see Table 12.
Vendors may provide their individual adapted calculation method if necessary.