The Encoder Model is derived from the PROFIdrive Drive Model as defined in [PDP]. The Encoder Profile defined in [ENCP] used as basis for this specification defines that a P-Device contains exactly one or multiple Encoder Units containing exactly one or multiple Encoder Objects (See Figure 1).
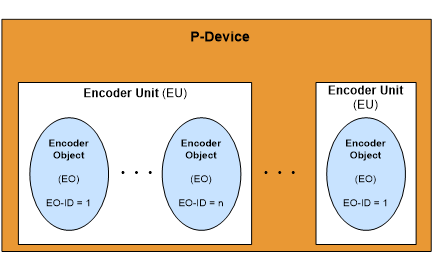
Figure 1 – General Encoder Unit model ([ENCP] chapter 5.2.3)
The main functions of a PROFINET Encoder are defined by the Encoder Object (EO). The general architecture of an Encoder Object is shown in Figure 2.
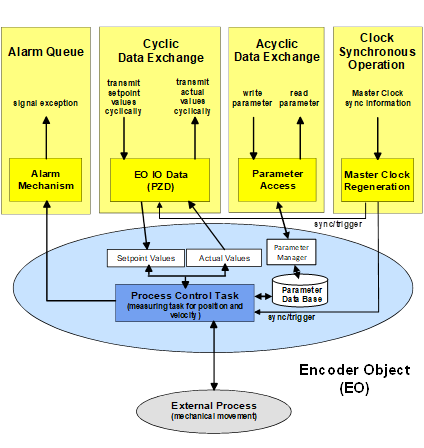
Figure 2 – General Encoder Object architecture ([ENCP] chapter 5.2.3)
As defined in [ENCP], the EO shall have the following minimum functionality:
- Parameters
- Measuring task
- IO Data (setpoint values, actual values)
- Support for diagnosis mechanism
- Clock synchronous operation
- Fault buffer
The OPC UA for PROFINET Encoder Information Model provides access to parameters, IO Data, diagnosis, and fault buffer information.
The communication channels available between the P-Device and other Devices are shown in Figure 3.
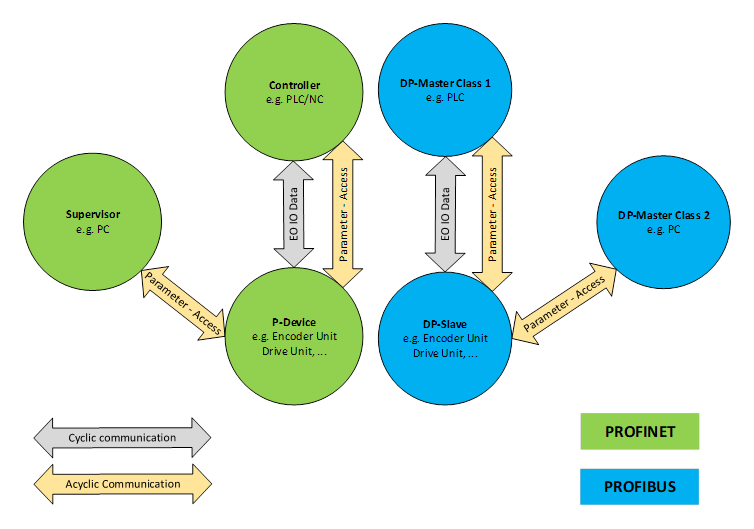
Figure 3 – Overview about available Communication Services
The Encoder Profile defined in [ENCP] allows two communication interfaces for Encoder devices: PROFIBUS or PROFINET. This specification applies to Encoder devices using different communication protocols also. PROFINET specific parts of the Information Model are optional.