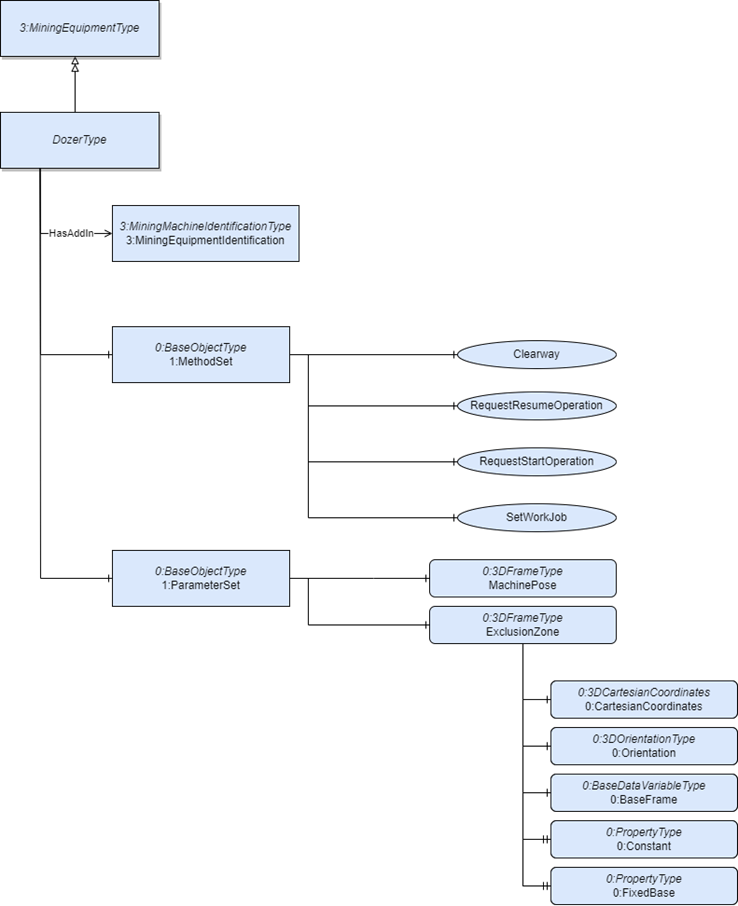
The DozerType provides a representation of a dozer machine as a sub-type of the MiningEquipmentType as shown in Figure 1. Importantly, it is composed of a ParameterSet and a MethodSet to monitor and control all relevant aspects of the equipment.
The DozerType is formally defined in Table 1.
Table 1 – DozerType Definition
|
Attribute |
Value |
||||
|
BrowseName |
DozerType |
||||
|
IsAbstract |
False |
||||
|
References |
Node Class |
BrowseName |
DataType |
TypeDefinition |
Others |
|
Subtype of the MiningEquipmentType defined in OPC 40560 |
|||||
|
0:HasAddIn |
Object |
4:MiningEquipmentIdentification |
|
4:MiningEquipmentIdentificationType |
M |
|
0:HasComponent |
Object |
2:MethodSet |
|
0:BaseObjectType |
M |
|
0:HasComponent |
Object |
2:ParameterSet |
|
0:BaseObjectType |
M |
|
Conformance Units |
|||||
|
Dozer Functional Variables |
|||||
|
Dozer Methods |
|||||
The components of the DozerType have subcomponents which are defined in Table 2.
Table 2 – DozerType Subcomponents
|
BrowsePath |
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
Others |
|
2:MethodSet |
0:HasComponent |
Method |
Clearway |
|
|
M |
|
2:MethodSet |
0:HasComponent |
Method |
RequestResumeOperation |
|
|
M |
|
2:MethodSet |
0:HasComponent |
Method |
RequestStopOperation |
|
|
M |
|
2:MethodSet |
0:HasComponent |
Method |
SetWorkJob |
|
|
M |
|
2:ParameterSet |
0:HasComponent |
Variable |
ExclusionZone |
0:3DFrame[] |
0:3DFrameType |
M, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
MachinePose |
0:3DFrame |
0:3DFrameType |
M, RO |
The signature of this Method is specified below. Table 3 specify the Arguments and AddressSpace representation, respectively.
Signature
Clearway(
[in] 0:3DFrame[] PassthroughExclusionZone,
[out] 0:Boolean ClearWayResult );
Table 3 – Clearway Method Arguments
|
Argument |
Description |
|
PassthroughExclusionZone |
The PassthroughExclusionZone property describes a 3D polygon specifying the trajectory of another machine that wants to pass through the dozer’s working area. |
|
ClearWayResult |
The ClearWayResult property describes whether the dozer has moved out of the other machine’s trajectory. True – Dozer has successfully moved out of the other machine’s trajectory False –Dozer has not successfully moved out of the other machine’s trajectory |
Table 4 – Clearway Method AddressSpace definition
|
Attribute |
Value |
||||
|
BrowseName |
Clearway |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
0:HasProperty |
Variable |
0:InputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
|
0:HasProperty |
Variable |
0:OutputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
The signature of this Method is specified below. Table 5 specify the Arguments and AddressSpace representation, respectively.
Signature
RequestResumeOperation(
[out] 0:Boolean RequestResult );
Table 5 – RequestResumeOperation Method Arguments
|
Argument |
Description |
|
RequestResult |
The RequestResult property describes whether the dozer has successfully resumed its work. True – Dozer has successfully resumed its dozing work False – Dozer has not successfully resumed its dozing work |
Table 6 – RequestResumeOperation Method AddressSpace definition
|
Attribute |
Value |
||||
|
BrowseName |
RequestResumeOperation |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
0:HasProperty |
Variable |
0:OutputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
The signature of this Method is specified below. Table 7 specify the Arguments and AddressSpace representation, respectively.
Signature
RequestStopOperation(
[out] 0:Boolean RequestResult );
Table 7 – RequestStopOperation Method Arguments
|
Argument |
Description |
|
RequestResult |
The RequestResult property describes whether the dozer has successfully stopped its operation so that the other machine can pass by. True – Dozer has successfully stopped its dozing work False – Dozer has not successfully stopped its dozing work |
Table 8 – RequestStopOperation Method AddressSpace definition
|
Attribute |
Value |
||||
|
BrowseName |
RequestStopOperation |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
0:HasProperty |
Variable |
0:OutputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
The signature of this Method is specified below. Table 9 specify the Arguments and AddressSpace representation, respectively.
Signature
SetWorkJob(
[in] 0:3DFrame[] WorkingArea,
[in] 0:3DFrame[] DumpArea, [in] DozerJobMissionEnum JobMission,
[out] 0:Boolean WorkJobRequestSuccess );
Table 9 – SetWorkJob Method Arguments
|
Argument |
Description |
|
WorkingArea |
The WorkingArea property describes a 3D polygon that spans the current working area of the dozer
|
|
DumpArea |
The DumpArea property describes a 3D polygon that spans the current dumping area of the dozer
|
|
JobMission |
The JobMissionNumber property describes the specific job the dozer should perform
|
|
WorkJobRequestSuccess |
The WorkJobRequestSuccess property describes whether the setting of a new dozer work job was successful or not. True – Work Job accepted False – Work Job not accepted |
Table 10 – SetWorkJob Method AddressSpace definition
|
Attribute |
Value |
||||
|
BrowseName |
SetWorkJob |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
0:HasProperty |
Variable |
0:InputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
|
0:HasProperty |
Variable |
0:OutputArguments |
0:Argument[] |
0:PropertyType |
0:Mandatory |
The Clearway method is called by a partnering machine to indicate that the dozer should move out of the other machine’s way.
The RequestStopOperation is called by a partnering machine to indicate that the dozer should stop its operation to let the other machine pass.
The RequestResumeOperation method is called by a partnering machine to indicate that the dozer can resume its dozing work.
The SetWorkJob method is called by a partnering machine to set a new dozer work job.
The ExclusionZone method indicates the zone which any other machine cannot enter as the dozer is currently performing it’s work within that zone.
The MachinePose variable describes the pose of the dozing machine in terms of location coordinates, orientation and (optional) base frame.
Please refer to OPC 10000-100, OPC 40001-1, OPC 40560 and OPC 40565-1 for the descriptions of other inherited instance declarations.