The following example provides an overview of the base features that the state machines defined in this annex will support. In the following, a more complex example is given, that also supports sub-state machines.
Figure B.1 gives an overview over a simple state machine. It contains the three states “State1”, “State2” and “State3”. There are transitions from “State1” to “State2”, “State2” to “State2”, etc. Some of the transitions provide additional information with regard to what causes (or triggers) the transition, for example the call of “Method1” for the transition from “State1” to “State2”. The effect (or action) of the transition can also be specified, for example the generation of an Event of the “EventType1” in the same transition. The notation used to identify the cause is simply listing it on the transition, the effect is prefixed with a “/”. More than one cause or effect are separated by a “,”. Not every transition has to have a cause or effect, for example the transition between “State2” and “State3”.
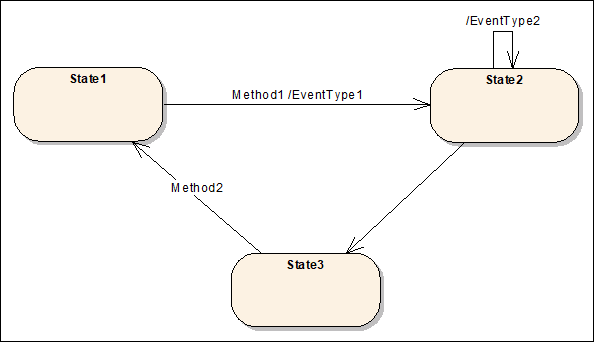
Figure B.1 – Example of a simple state machine
For simplicity, the state machines described in this annex will only support causes in form of specifying Methods that have to be called and effects in form of EventTypes of Events that are generated. However, the defined infrastructure allows extending this to support additional different causes and effects.