The MotionDeviceSystemType provides a representation of a motion device system as an entry point to the OPC UA device set. At least one instance of a MotionDeviceSystemType must be instantiated in the DeviceSet. This instance organises the information model of a complete robotics system using instances of the described ObjectTypes. The MotionDeviceSystemType is formally defined in Table 11.
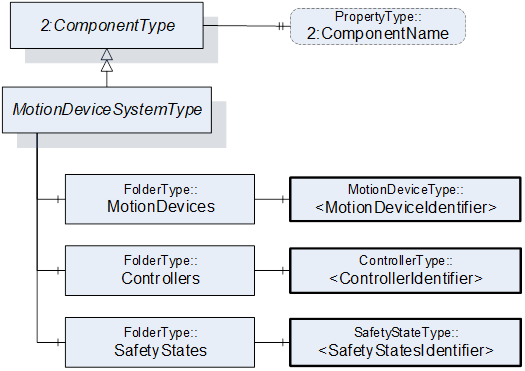
Figure 12 – Overview MotionDeviceSystemType
Table 11 – MotionDeviceSystemType Definition
|
Attribute |
Value |
||||
|
BrowseName |
MotionDeviceSystemType |
||||
|
IsAbstract |
False |
||||
|
References |
Node Class |
BrowseName |
DataType |
TypeDefinition |
Other |
|
Subtype of the ComponentType defined in OPC Unified Architecture for Devices (DI), inheriting the InstanceDeclarations of that Node |
|||||
|
0:HasComponent |
Object |
MotionDevices |
|
0:FolderType |
M |
|
0:HasComponent |
Object |
Controllers |
|
0:FolderType |
M |
|
0:HasComponent |
Object |
SafetyStates |
|
0:FolderType |
M |
|
0:HasProperty |
Variable |
2:ComponentName |
0:LocalizedText |
0:PropertyType |
O |
|
Conformance Units |
|||||
|
Rob MotionDeviceSystem Base |
|||||
The components of the MotionDeviceSystemType have additional subcomponents which are defined in Table 12.
Table 12 – MotionDeviceSystemType Additional Subcomponents
|
Source Path |
Reference |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
Others |
|
MotionDevices |
0:HasComponent |
Object |
<MotionDeviceIdentifier> |
|
MotionDeviceType |
MP |
|
Controllers |
0:HasComponent |
Object |
<ControllerIdentifier> |
|
ControllerType |
MP |
|
SafetyStates |
0:HasComponent |
Object |
<SafetyStateIdentifier> |
|
SafetyStateType |
MP |
A motion device system may consist of multiple motion devices, controllers, and safety systems. References are used to describe the relations between those subsystems. Examples are described in Annex B.
The ComponentName property provides a user writeable name provided by the vendor, integrator, or user of the device. The ComponentName may be a default name given by the vendor. This property is defined by ComponentType defined in OPC 10000-100.
MotionDevices is a container for one or more instances of the MotionDeviceType.
Controllers is a container for one or more instances of the ControllerType.
SafetyStates is a container for one or more instances of the SafetyStatesType.