Following example address space describes the Spatial Relative Location concept with different objects used in an example industrial application (Figure 18). A robot mounted on a linear unit carrying an exchangeable robot tool. A second tool to change is placed at a change station on a table. Additionally, a tool for the robot is configured and not used in this application scenario (so Variable Base is NULL), but may occur, when brought in spatial relationship to frames SpatialObjects of this SpatialObjectsList.
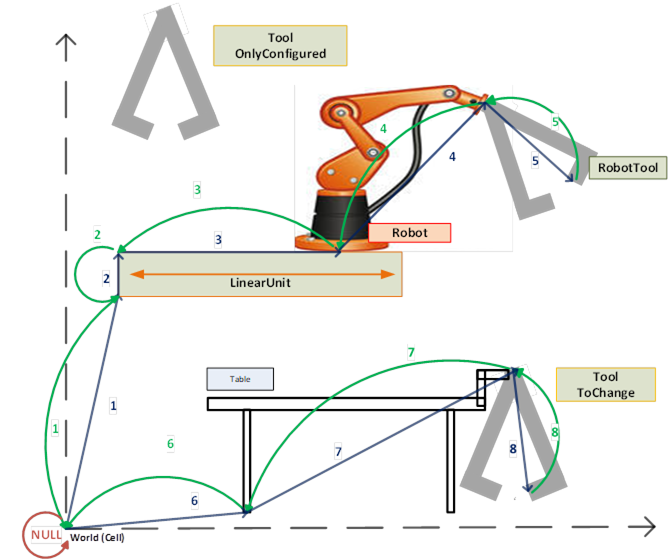
Figure 18 – Objects and their relative positions in an industrial application
Following figure (Figure 19) shows different representations how, for example, the SpatialObject of the LinearUnit can be described
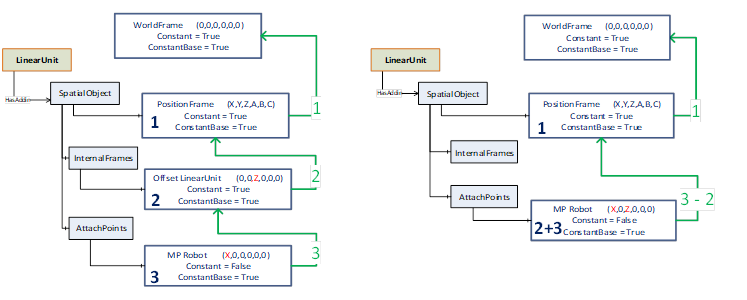
Figure 19 – Possible representations of the linear unit from the previous example
Following figure (Figure 20) shows an example address space for an automation cell as shown in Figure 18
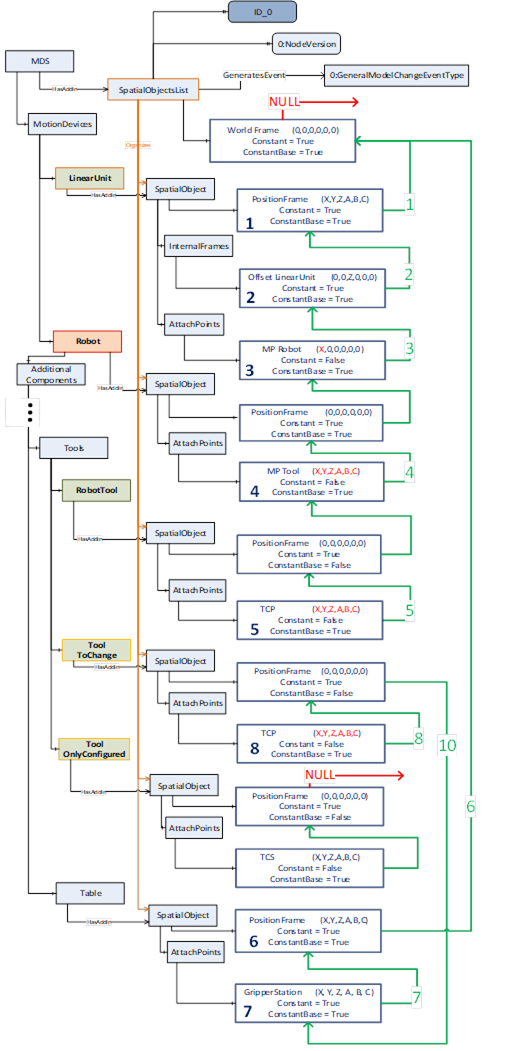
Figure 20 – Modelling of the example scenario using RSL concept