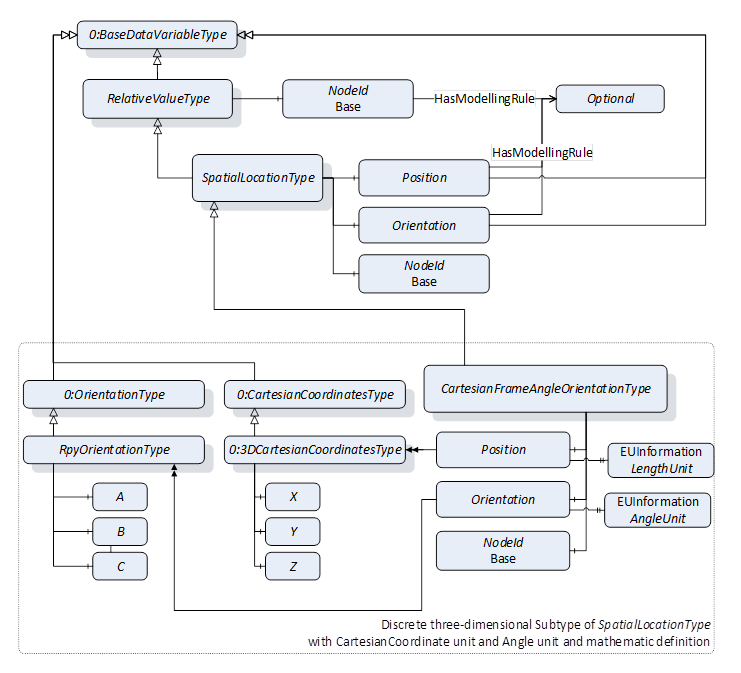
Figure 2 – RelativeValueType and SpatialLocationType Overview
The RelativeValueType provides a Variable to describe relationship of the Value and is described in 7.1
The SpatialLocationType provides Variables to describe a location and is described in 7.2. The Variable Base shall point to the node, on which this location is based. A subtype of SpatialLocationType is needed to use the Relative Spatial Location AddIns.
The CartesianFrameAngleOrientationType, described in 7.3, provides a discrete description of a frame, with a position defined by cartesian coordinates and an orientation defined by Euler angles, and unique maths.
Annex E describes how other subtypes of SpatialLocationType can be created and used with ConformanceUnits of the RSL concept.
Figure 3 shows an overview of Relative Spatial Location AddIns by using the CartesianFrameAngleOrientationType as a subtype of the SpatialLocationType and which ConformanceUnits are defined to describe implemented instances.
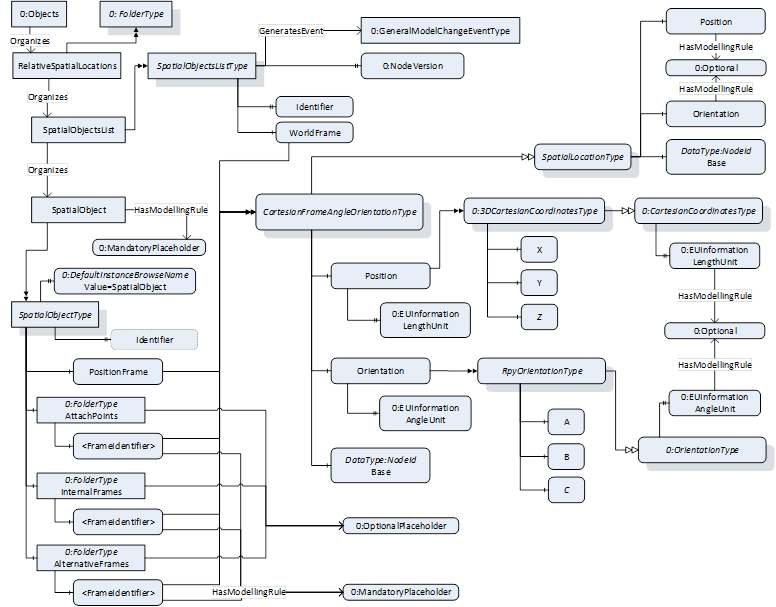
Figure 3 – Relative Spatial Location Information Model overview
The folder RelativeSpatialLocations, described in 8.1, shall be used to organize all instances of SpatialObjectsListType in one server and may be used as a standard entry point to all type instances described by this model.
The SpatialObjectsListType AddIn, described in 6.2, organizes all instances of SpatialObjectType which are directly or indirectly related to a common coordinate system (WorldFrame). It is recommended to implement in one instance of SpatialObjectsListType only one kind of a discrete subtype instance of SpatialLocationType, e.g., the CartesianFrameAngleOrientationType.
The SpatialObjectType Addin, described in 6.1, can be used to enhance any object in address space with a relative spatial location description.