The VelocityDriveAxisType is an DriveAxisType with a speed command interface. Figure 18 shows a block diagram demonstrating the basic organization and control flow for this axis type. If the Drive is a PROFIdrive the VelocityDriveAxisType is used to represent AC1 Drive Objects using a speed command interface.
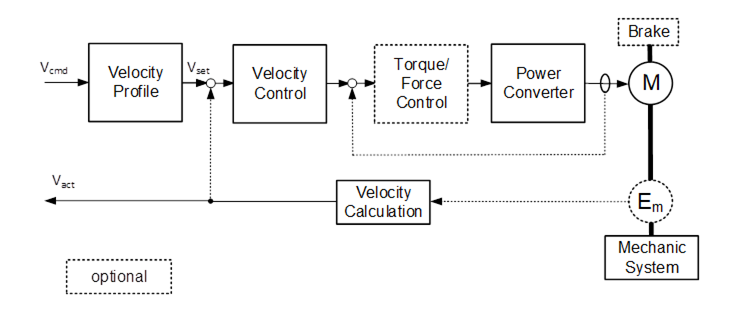
Figure 18 – VelocityDriveAxisType Block Diagram
Figure 19 shows the components added by the VelocityDriveAxisType ObjectType to the DriveAxisType it is derived from.
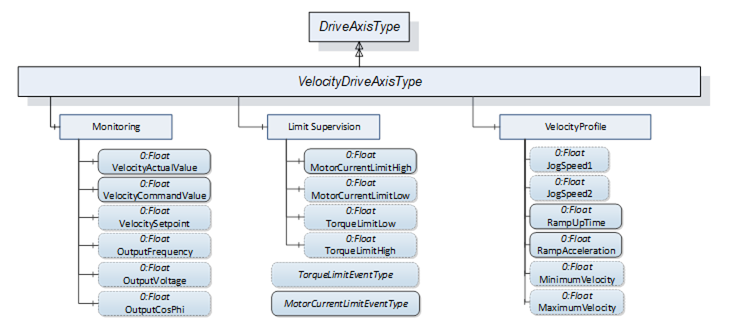
Figure 19 – Components added by VelocityDriveAxisType
The formal definition of the VelocityDriveAxisType ObjectType can be found in Table 18.
Table 18 – VelocityDriveAxisType Definition
|
Attribute |
Value |
||||
|
BrowseName |
VelocityDriveAxisType |
||||
|
IsAbstract |
False |
||||
|
References |
Node Class |
BrowseName |
DataType |
TypeDefinition |
Other |
|
Subtype of the DriveAxisType. |
|||||
|
0:GeneratesEvent |
ObjectType |
TorqueLimitEventType |
|
|
|
|
0:GeneratesEvent |
ObjectType |
MotorCurrentLimitEventType |
|
|
|
|
Conformance Units |
|||||
|
PDRV Measurement |
|||||
|
|
|||||
The components of the VelocityDriveAxisType have additional subcomponents which are defined in Table 19.
Table 19 – VelocityDriveAxisType additional Subcomponents
|
BrowsePath |
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
Others |
|
Monitoring |
0:HasComponent |
Variable |
VelocitySetpoint |
0:Float |
0:AnalogUnitType |
M, RO |
|
Monitoring |
0:HasComponent |
Variable |
VelocityCommandValue |
0:Float |
0:AnalogUnitType |
M, RO |
|
Monitoring |
0:HasComponent |
Variable |
VelocityActualValue |
0:Float |
0:AnalogUnitType |
M, RO |
|
Monitoring |
0:HasComponent |
Variable |
OutputFrequency |
0:Float |
0:AnalogUnitType |
O, RO |
|
Monitoring |
0:HasComponent |
Variable |
OutputVoltage |
0:Float |
0:AnalogUnitType |
O, RO |
|
Monitoring |
0:HasComponent |
Variable |
OutputCosPhi |
0:Float |
0:BaseAnalogType |
O, RO |
|
LimitSupervision |
0:HasComponent |
Variable |
MotorCurrentLimitHigh |
0:Float |
0:AnalogUnitType |
O, RO |
|
LimitSupervision |
0:HasComponent |
Variable |
MotorCurrentLimitLow |
0:Float |
0:AnalogUnitType |
O, RO |
|
LimitSupervision |
0:HasComponent |
Variable |
TorqueLimitLow |
0:Float |
0:AnalogUnitType |
O, RO |
|
LimitSupervision |
0:HasComponent |
Variable |
TorqueLimitHigh |
0:Float |
0:AnalogUnitType |
O, RO |
|
VelocityProfile |
0:HasComponent |
Variable |
JogSpeed1 |
0:Float |
0:AnalogUnitType |
O, RO |
|
VelocityProfile |
0:HasComponent |
Variable |
JogSpeed2 |
0:Float |
0:AnalogUnitType |
O, RO |
|
VelocityProfile |
0:HasComponent |
Variable |
RfgRampUpTime |
0:Float |
0:BaseAnalogType |
M, RO |
|
VelocityProfile |
0:HasComponent |
Variable |
RfgAcceleration |
0:Float |
0:AnalogUnitType |
M, RO |
|
VelocityProfile |
0:HasComponent |
Variable |
MinimumVelocity |
0:Float |
0:AnalogUnitType |
O, RO |
|
VelocityProfile |
0:HasComponent |
Variable |
MaximumVelocity |
0:Float |
0:AnalogUnitType |
O, RO |