
4 Application and Use Cases of OPC 40569-4: Dozing
4.1 Application Case Dozing
The Application Case Dozing is composed of all defined and modelled Use Cases for a surface mining dozing operation. Specifically, this refers to rock clearing operations. The detailed descriptions and diagrams for the UCs belonging to this AC can be found in Chapter 4.2. Table 1 contains information regarding the chapter number of each Use Case within the AC Dozing and the involved equipment. The rows contain the different equipment types used within the Use Cases, which are displayed in the columns.
| Use Cases → | Dozing | Request Dozing | Parameter- Subscription |
|---|---|---|---|
| Equipment ↓ | |||
| Dozing Machine | 4.2.2 | 4.2.1 | 4.2.3 |
| Any other Machine |
4.2 Use Cases for the AC Dozing
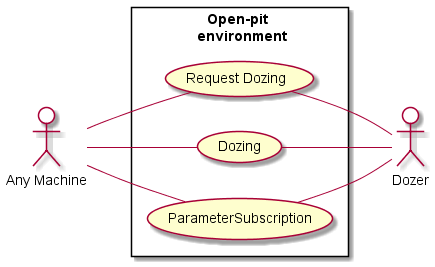
The Dozing AC consists of two interacting participants - a dozer and any other machine. Goal of this AC is to have the dozer machine clear a certain area. Typically, a surface mining load-and-haul operation causes the loading area to be cluttered with rock fallen from either the truck bed or from an excavator’s shovel. Any type of machine can then detect this and request the dozer to start clearing the area. To support autonomous, decentralized dozing operations, the following Use Cases describe the required machine communication between two a dozer and any other machine for requesting the dozer’s clearing operation and passing safely through an area that it currently being cleared by the dozer as depicted in Figure 1.
4.2.1 Use Case Request Dozing
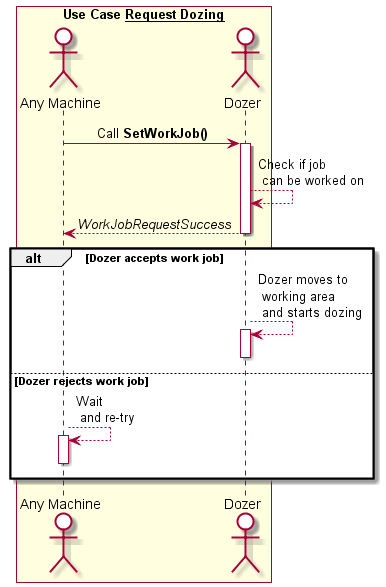
Any machine can request a dozer machine to perform a dozing job in a specific area. The mobile machine capable of doing dozing jobs, provides a SetWorkJob-Method. When calling this method, the other vehicle needs to pass three arguments: The first argument is a list of cartesian coordinates defining a 3D Polygon as a working area. The second argument is list of cartesian coordinates defining a 3D Polygon as a dump area. The dump area can be null, if the dozer is free to decide where to dump the soil and rock. The third argument is a number defining the job type, the dozing machine should perform. These include, amongst others,
Clean-Up operations
Ripping operations
Topsoil-Removal operations
Blast-Clean-Up operations etc.
A graphical representation of the UC is depicted in Figure 2.
4.2.2 Use Case Dozing
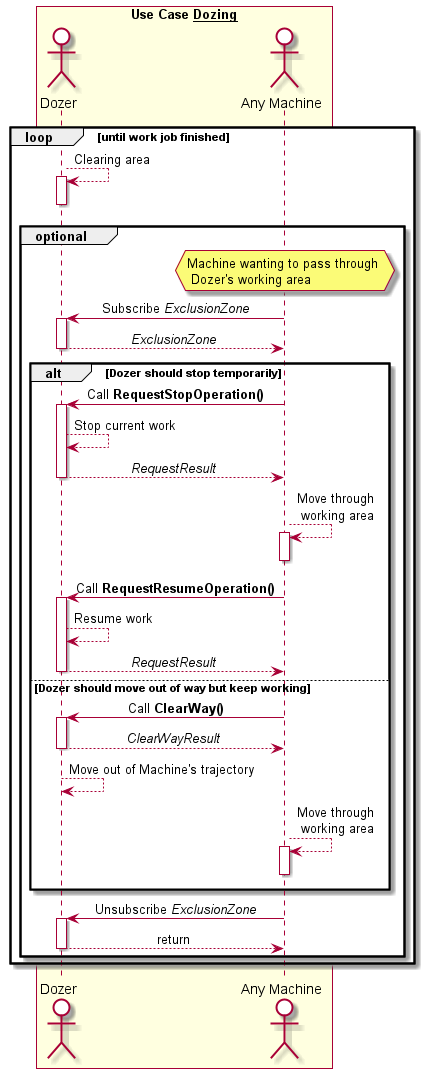
Given that a dozer machine is performing dozing operations in a specific area, the dozer occupies a certain working area, which is not safe to pass for other machines. This area is defined as an ExclusionZone. Other machines can read the ExclusionZone of the dozing machine. If the other machine wants to enter the ExclusionZone, the other machine can interrupt the dozer in its current operation.
Stopping the dozer from performing its current operation is made possible by being able to call the RequestStopOperation-Method or the ClearWay-Method provided by the dozer. The RequestStopOperation-Method stops the dozing machine’s operation and indicates that the dozer should not move at all. When calling the ClearWay-Method, the other machine needs to pass a list of CartesianCoordinates, defining a 2D Polygon, as an input argument for the method. The dozing machine then moves out of this area.
The other machine can subscribe the ExclusionZone of the dozer to receive notifications about updates to the dozer’s ExclusionZone. As soon as the dozer has stopped (if the RequestStopOperation-Method was called) or moved out of the area (if the ClearWay-Method was called), the ExclusionZone of the dozer changes, since the area is safe to pass now. The other machine can now pass safely. After leaving the former ExclusionZone, the other machine can call the method ResumeOperation. Then, the dozer continues its previous operation and changes the ExclusionZone to what it was before.
A sequence diagram of this UC interaction is shown in Figure 3.
4.2.3 Use Case ParameterSubscription
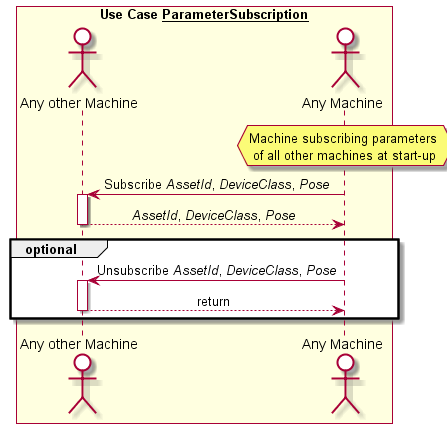
The ParameterSubscription UC allows any mobile machine to request meta-information, such as AssetId or DeviceClass of another mobile machine. As mobile mining machines, such as a hydraulic excavator, dozer or a dump truck, typically roam around freely, it becomes necessary, in the context of an autonomous, decentralized operation, for machines to inform each other about their current location and device type. Using the variables described in this UC, this information can be requested or subscribed. A sequence diagram of this UC is depicted in Figure 4.
___________