This building block provides information about the MachineryOperationMode of a MachineryItem. It defines some common top-level modes. Companion specifications or vendors might extend those modes with submodes, but cannot add additional top-level modes. In order to have a modelling mechanism that allows the creation of submodes, but also to define causes and effects on specific transitions, the concept of a FiniteStateMachine defined in OPC 10000-16 is used. Since the intention of this base specification is not to restrict the Transitions between the States, the StateMachine defines Transitions between all States. Instances might restrict the usage of the defined States and Transitions. That might be used by domain-specific companion specifications to restrict the usage of the StateMachine. An overview of the StateMachine is given in Figure 16. The States are further described in 13.2.
Note that the MachineryOperationMode may not be known by the MachineryItem itself. In this case, the information needs to be provided by an external source like an MES system or the operator.
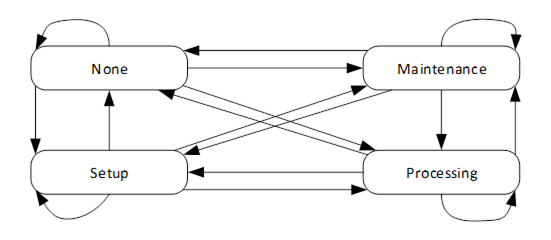
Figure 16 – MachineryOperationMode StateMachine
The overview of the building block is shown in Figure 17. The MachineryOperationModeStateMachineType is a subtype of the FiniteStateMachineType defining the States and Transitions of that StateMachine. The usage of the building block is also shown in that figure. An instance of the MachineryOperationModeStateMachineType is added to the Object MyMachine representing a Machine using the AddIn concept. The MachineryOperationModeStateMachineType is defined in 13.2.
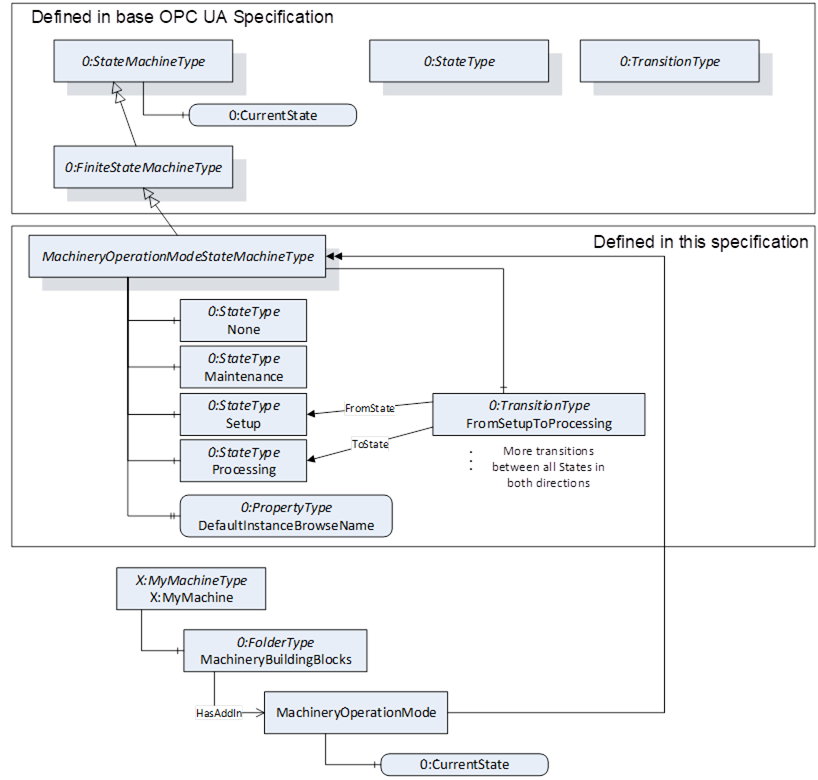
Figure 17 – Building Block for MachineryOperationMode
In Figure 18, a more complex example is shown, where the Machine also contains a component having the MachineryItemState.
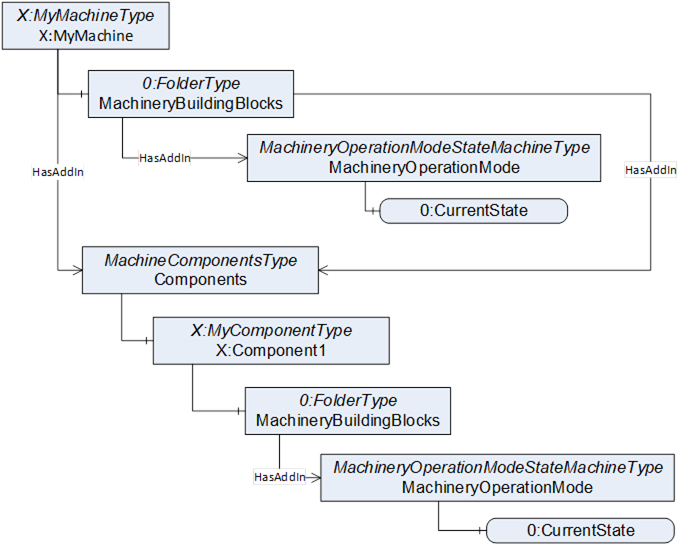
Figure 18 – Example of using the MachineryOperationMode