As described in Section 8.1.2.1 the VisionAutomaticMode SubStateMachine of the Operational state can be entered in two different ways:
- From the Preoperational state of the parent state machine through an automatic transition or a transition triggered by the SelectModeAutomatic method into the Initialized state of the VisionAutomaticModeStateMachine. In these cases, the parent state machine transitions into the parent state Operational implicitly.
- From the Error state of the parent state machine through an automatic transition into the Operational state of the parent state machine. In this case the server will decide based on the conditions in the vision system in which state of the VisionAutomaticModeStateMachine the system ends up.
Figure 25 shows these ways; for clarity, all other transitions have been left out. The transitions from the Preoperational state are shown as solid lines as they are actually modelled in the type definition. The transitions from the Error state are shown in dashed lines as they are not explicitly modelled but only “virtual” transitions decided by the server internally.
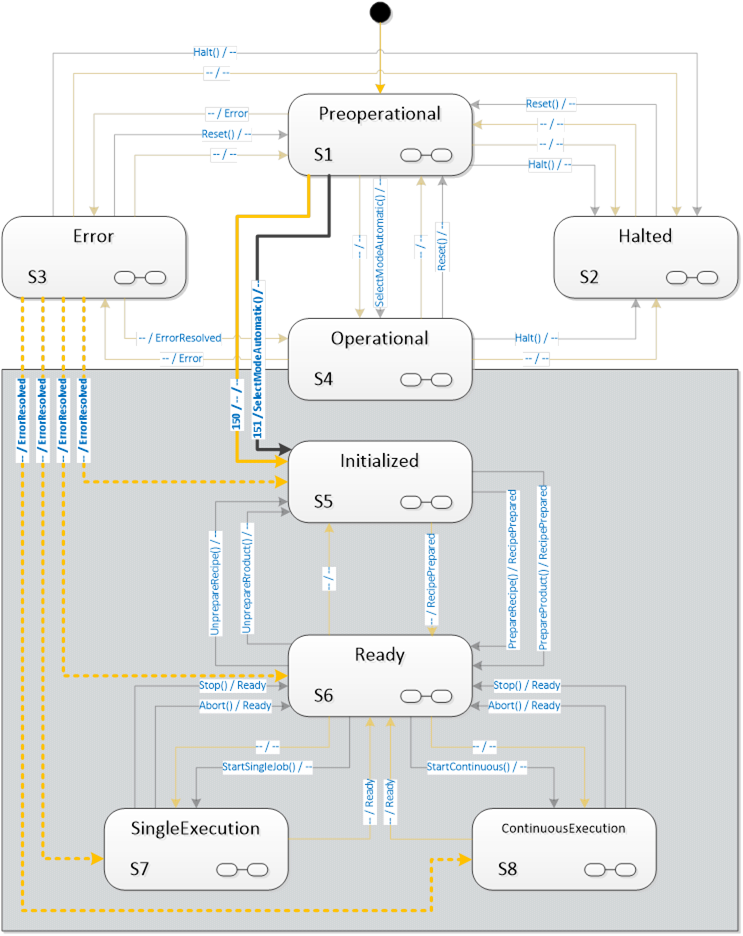
Figure 25 – Entering the VisionAutomaticModeStateMachine SubStateMachine