VisionAutomaticModeStateMachineType is an ObjectType subtype of FiniteStateMachineType and represents the behavior of a vision system in automatic operation.
The conceptual idea is that of a vision system installed on a production line for inline inspection or process control. This is taken in a very broad sense to cover other situations easily, like sample test stations where a human operator starts the inspection jobs or robot-mounted systems for position guidance. Thus, the state machine reflects the goal of specifying a system to be easily integrated into automated production and inspection systems.
The Operational state of the VisionStateMachineType has a mandatory SubStateMachine of the VisionAutomaticModeStateMachineType, indicating that this mode of operation shall always be present in a vision system conforming to this specification.
This SubStateMachine is typically entered by a transition from state Preoperational to its internal state Initialized, either an automatic transition or caused by the SelectModeAutomatic method
It can also be entered by automatic transitions from state Error to any of its internal states. These transitions exist to allow the vision system to try after resolving an error to resume operation with the “highest possible state”. That means, when the error occurs in SingleExecution state, the vision system will try to resume and finish this operation. Failing that, it will try to return to Ready state for the next Start method; failing that, it will return to state Initialized to be made Ready again. Note however, that the method of resolving an error and resuming operation after the Error state is defined by the vision system, not this specification.
In the following state diagram, method-triggered transitions are again black with the method written as UML trigger; automatic transitions are orange with a possible event as UML effect introduced with a “/”.
To clarify the entire context, the other main states are also shown in Figure 24. For clarity, transitions from the top-level VisionStateMachine into states of the VisionAutomaticModeStateMachine are not shown in the diagram.
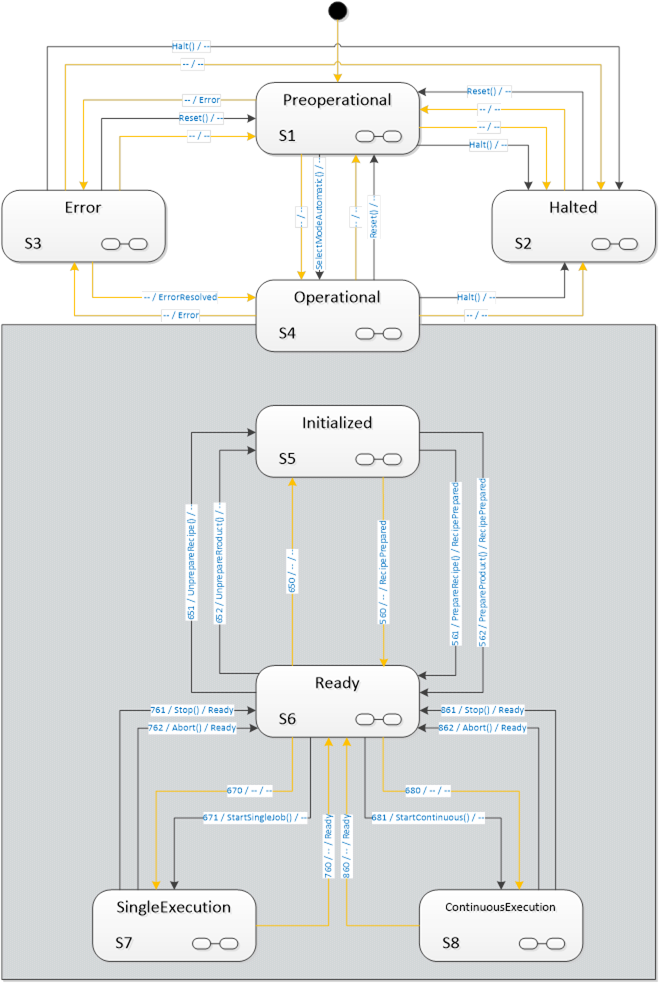
Figure 24 – States and transitions of the VisionAutomaticModeStateMachineType
Interactions between external systems and the global “AutomaticMode” state machine are limited to few transitions in the model which we will see in detail in the description of methods and transitions. The most prominent points are obviously the Start-methods, typically used by a client to start operation of a vision system.
However, there is frequently a need to synchronize operations between the vision systems and external systems where the vision system remains conceptually in one of the states of the “AutomaticMode” state machine. The most obvious example is that of taking images of a part from various positions, either by moving the part relative to a camera system, handling it with a robot arm, or by moving the camera relative to the part, again possibly by a robot manipulator. This entire interaction would conceptually take place within SingleExecution state or ContinuousExecution state.
To enable all states in the “AutomaticMode” state machine to carry out such interactions, each is marked as a complex state by the  symbol, and has an optional SubStateMachine of the VisionStepModelStateMachineType.
symbol, and has an optional SubStateMachine of the VisionStepModelStateMachineType.