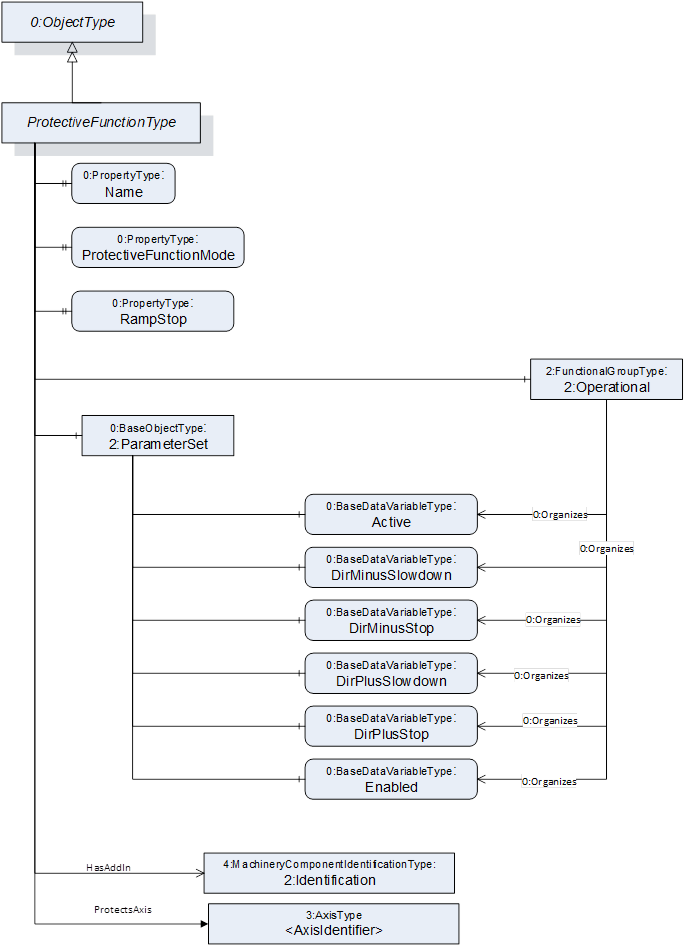
Figure 15 – Overview ProtectiveFunctionType
The ProtectiveFunctionType represents a hardware or software function designed to affect motion of the crane in order to protect personnel, equipment and/or the environment. Examples include force limiters (overload protection), limit switches and software anti-collision systems. A protective function can slow down and/or stop the motion of the crane in one or more axis. The use case is similar to OPC 40010-1 ProtectiveStopFunctionType and EmergencyStopFunctionType (OPC Robotics), but with the additional capability to also represent functions which slow down motions (instead of stopping) or stop motions in one direction while still allowing it in the other direction. ProtectiveFunctionType is formally defined in Table 23.
Table 23 – ProtectiveFunctionType Definiton
|
Attribute |
Value |
||||
|
BrowseName |
ProtectiveFunctionType |
||||
|
IsAbstract |
False |
||||
|
References |
Node Class |
BrowseName |
DataType |
TypeDefinition |
Other |
|
Subtype of the 0:BaseObjectType defined in OPC 10000-100, i. e. inheriting the InstanceDeclarations of that Node. |
|||||
|
0:HasAddIn |
Object |
2:Identification |
|
4:MachineryComponentIdentificationType |
O |
|
0:HasComponent |
Object |
2:ParameterSet |
|
0:BaseObjectType |
M |
|
0:HasComponent |
Object |
2:Operational |
|
2:FunctionalGroupType |
O |
|
0:HasProperty |
Variable |
Name |
0:String |
0:PropertyType |
O, RO |
|
0:HasProperty |
Variable |
ProtectiveFunctionMode |
ProtectiveFunctionEnum |
0:PropertyType |
O, RO |
|
0:HasProperty |
Variable |
RampDown |
0:Boolean |
0:PropertyType |
O, RO |
|
Conformance Units |
|||||
|
Cranes Base Info ProtectiveFunctionType |
|||||
The Name variable contains a human-readable textual identifier of the function.
The Identification Object provides identification information of the protective function. It is specified in OPC 10000-100 and OPC 40001-1.
The Operational FunctionalGroup contains variables which represent the current state of the protective function. This is read-only.
The ProtectiveFunctionMode variable describes what kind of protective function a specific instance of ProtectiveFunctionType describes, e. g. force limiter for overload protection devices or motion limiter for limit switches etc. The enumeration is defined in 8.4 ProtectiveFunctionEnum.
The components of the ProtectiveFunctionType have additional subcomponents which are defined in Table 17.
The RampDown Property indicates where a motion is slowed down using a graceful ramp down e.g. using software functionality instead of brakes.
An instance of the ProtectiveFunctionType can have multiple associated axis, instances of the 3:AxisType, which are protected by the protective function. The Non-Hierarchical Reference ProtectsAxis is used to express this relation. For more information on this reference, see section 9.1.
Table 24 – ProtectiveFunctionType Additional Subcomponents
|
BrowsePath |
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
Others |
|
2:ParameterSet |
0:HasComponent |
Variable |
Active |
0:Boolean |
0:BaseDataVariableType |
O, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
DirMinusSlowdown |
0:Boolean |
0:BaseDataVariableType |
O, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
DirMinusStop |
0:Boolean |
0:BaseDataVariableType |
O, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
DirPlusSlowdown |
0:Boolean |
0:BaseDataVariableType |
O, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
DirPlusStop |
0:Boolean |
0:BaseDataVariableType |
O, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
Enabled |
0:Boolean |
0:BaseDataVariableType |
O, RO |
|
2:Operational |
0:Organizes |
Variable |
Active |
0:Boolean |
0:BaseDataVariableType |
O, RO |
|
2:Operational |
0:Organizes |
Variable |
DirMinusSlowdown |
0:Boolean |
0:BaseDataVariableType |
O, RO |
|
2:Operational |
0:Organizes |
Variable |
DirMinusStop |
0:Boolean |
0:BaseDataVariableType |
O, RO |
|
2:Operational |
0:Organizes |
Variable |
DirPlusSlowdown |
0:Boolean |
0:BaseDataVariableType |
O, RO |
|
2:Operational |
0:Organizes |
Variable |
DirPlusStop |
0:Boolean |
0:BaseDataVariableType |
O, RO |
|
2:Operational |
0:Organizes |
Variable |
Enabled |
0:Boolean |
0:BaseDataVariableType |
O, RO |
The Active variable provides information about the protective function state. It is TRUE if this particular protective function is active, i. e. that a stop or slowdown is initiated, FALSE otherwise. If Enabled is FALSE, then Active shall be FALSE.
The DirMinusSlowdown variable provides information about the speed reduction capabilities of the protective function. When TRUE, slowdown movement is enabled for direction where position value decreases (minus).
The DirMinusStop variable provides information about the stop capabilities of the protective function. When TRUE, Stop is enabled for direction where position value decreases (minus).
The DirPlusSlowdown variable provides information about the speed reduction capabilities of the protective function. When TRUE, slowdown movement is enabled for direction where position value increases (plus).
The DirPlusStop variable provides information about the stop capabilities of the protective function. When TRUE, stop is enabled for direction where position value increases (plus).
The Enabled variable provides information about the availability of the protective function. It is TRUE if this protective function is currently supervising the system, FALSE otherwise. A protective function may or may not be enabled at all times, e. g. the protective stop function of the safety doors are typically enabled in automatic operational mode and disabled in manual mode.