The BrakeType is used to describe the status of a brake. In this specification, it is only defined to model the backup brakes. A service brake status is provided by the BrakeReleased variable of the OPC 40010-1 (OPC Robotics) MotorType object. The Figure 13 shows an overview of this type.
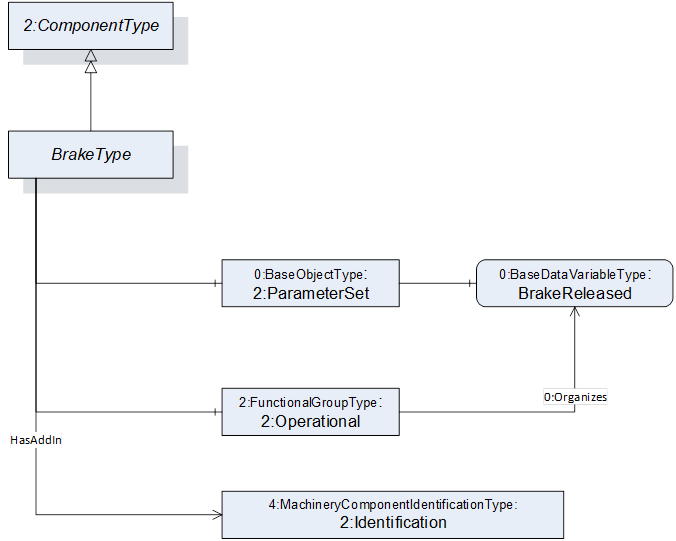
Figure 13 – Overview BrakeType
The BrakeType represents the backup brake and contains its various components. The BrakeType is formally defined in Table 19.
Table 19 – BrakeType Definiton
|
Attribute |
Value |
||||
|
BrowseName |
BrakeType |
||||
|
IsAbstract |
False |
||||
|
References |
Node Class |
BrowseName |
DataType |
TypeDefinition |
Other |
|
Subtype of the 2:ComponentType defined in OPC 10000-100, i. e. inheriting the InstanceDeclarations of that Node. |
|||||
|
0:HasComponent |
Object |
2:Operational |
|
2:FunctionalGroupType |
O |
|
0:HasComponent |
Object |
2:ParameterSet |
|
0:BaseObjectType |
M |
|
0:HasAddIn |
Object |
2:Identification |
|
4:MachineryComponentIdentificationType |
O |
|
Conformance Units |
|||||
|
Cranes Base Info BrakeType |
|||||
The Identification Object provides identification information of the brake. It is specified in OPC 10000-100 and OPC 40001-1.
ParameterSet contains all the variables of the BrakeType. Variables are also referenced by an Organizes from Operational FunctionalGroup.
The components of the BrakeType have additional subcomponents which are defined in Table 20.
Table 20 – BrakeType Additional Subcomponents
|
BrowsePath |
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
Others |
|
2:ParameterSet |
0:HasComponent |
Variable |
BrakeReleased |
0:Boolean |
0:BaseDataVariableType |
M, RO |
|
2:Operational |
0:Organizes |
Variable |
BrakeReleased |
0:Boolean |
0:BaseDataVariableType |
M, RO |
The BrakeReleased variable describes the current state of the brake. It is TRUE when the brake is not engaged and FALSE when the brake is stopping the motion.