The CraneMotionDeviceSystemType provides a representation of a crane motion device system as an entry point to the OPC UA device set. At least one instance of a CraneMotionDeviceSystemType must be instantiated in the DeviceSet. This instance organises the information model of a complete crane system using instances of the described ObjectTypes.
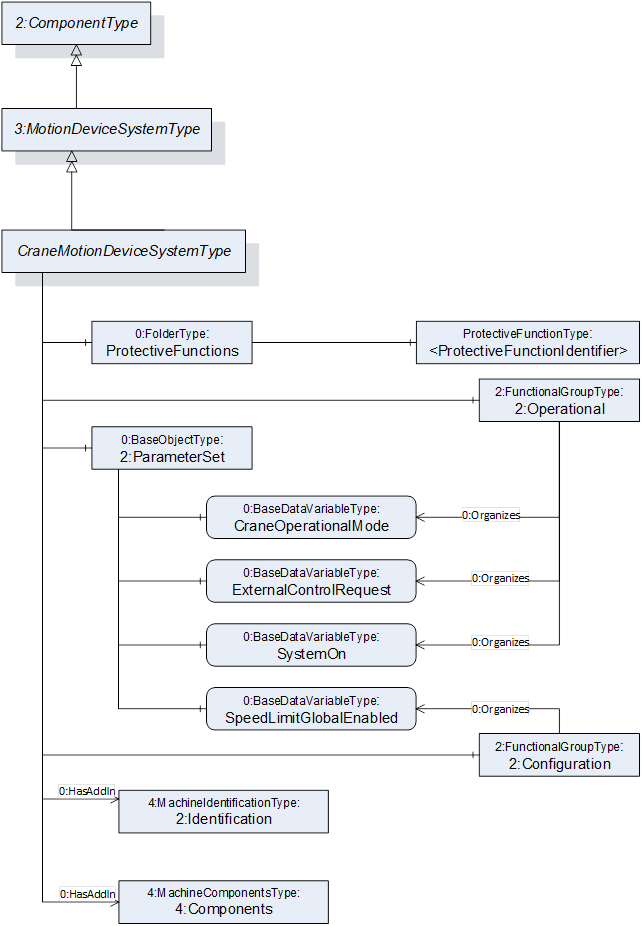
Figure 10 – Overview CraneMotionDeviceSystemType
The CraneMotionDeviceSystemType represents the entire crane and contains its various components. The type is a subtype of the OPC 40010-1 MotionDeviceSystemType (OPC Robotics) and this is intended to provide compatibility with OPC 40010-1 aware clients. The CraneMotionDeviceSystemType is formally defined in Table 12.
Table 12 – CraneMotionDeviceSystemType Definition
|
Attribute |
Value |
||||
|
BrowseName |
CraneMotionDeviceSystemType |
||||
|
IsAbstract |
False |
||||
|
References |
Node Class |
BrowseName |
DataType |
TypeDefinition |
Other |
|
Subtype of the 3:MotionDeviceSystemType defined in OPC 40010-1, i.e. inheriting the InstanceDeclarations of that Node. |
|||||
|
0:HasComponent |
Object |
2:ParameterSet |
|
0:BaseObjectType |
M |
|
0:HasComponent |
Object |
ProtectiveFunctions |
|
0:FolderType |
O |
|
0:HasAddIn |
Object |
2:Identification |
|
4:MachineIdentificationType |
M |
|
0:HasAddIn |
Object |
4:Components |
|
4:MachineComponentsType |
O |
|
0:HasComponent |
Object |
2:Operational |
|
2:FunctionalGroupType |
O |
|
0:HasComponent |
Object |
2:Configuration |
|
2:FunctionalGroupType |
O |
|
Conformance Units |
|||||
|
Cranes Base Info CraneMotionDeviceSystemType |
|||||
ParameterSet contains all the variables of the CraneMotionDeviceSystemType. variables are also referenced by an Organizes from either Configuration or Operational FunctionalGroup.
ProtectiveFunctions is a Folder for both hardware and software functions designed to affect motion of the crane in order to protect personnel, equipment and/or the environment. Examples include force limiters (overload protection), limit switches and software anti-collision systems. A protective function can slow down and/or stop the motion of the crane in one or more axis.
The Identification Object provides identification information of the crane. It is specified in OPC 10000-100 and OPC 40001-1.
As defined in OPC 40001-1 4:Components allows the listing of all subcomponents of a CraneMotionDeviceSystem.
The Operational FunctionalGroup contains variables which represent the current state of the crane (motion device system). This is read-only, online data.
The Configuration FunctionalGroup contains variables which can be used to assess and/or affect the control of the crane, such as setting a speed limit for crane motions.
The components of the CraneMotionDeviceSystemType have additional subcomponents which are defined in Table 13.
Table 13 – CraneMotionDeviceSystemType Additional Subcomponents
|
BrowsePath |
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
Others |
|
2:ParameterSet |
0:HasComponent |
Variable |
CraneOperationalMode |
CraneOperationalModeEnum |
0:BaseDataVariableType |
M, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
ExternalControlRequest |
ExternalControlRequestEnum |
0:BaseDataVariableType |
O, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
SpeedLimitGlobalEnabled |
0:Boolean |
0:BaseDataVariableType |
O, RW |
|
2:ParameterSet |
0:HasComponent |
Variable |
SystemOn |
0:Boolean |
0:BaseDataVariableType |
M, RO |
|
2:Operational |
0:Organizes |
Variable |
CraneOperationalMode |
CraneOperationalModeEnum |
0:BaseDataVariableType |
M, RO |
|
2:Operational |
0:Organizes |
Variable |
ExternalControlRequest |
ExternalControlRequestEnum |
0:BaseDataVariableType |
O, RO |
|
2:Operational |
0:Organizes |
Variable |
SystemOn |
0:Boolean |
0:BaseDataVariableType |
M, RO |
|
2:Configuration |
0:Organizes |
Variable |
SpeedLimitGlobalEnabled |
0:Boolean |
0:BaseDataVariableType |
O, RW |
|
ProtectiveFunctions |
0:HasComponent |
Object |
<ProtectiveFunctionIdentifier> |
|
ProtectiveFunctionType |
MP |
The parameter CraneOperationalMode provides information to the client about the mode of operation the crane is in. See Table 25 for the possible values for the mode enumerations and their descriptions.
The parameter ExternalControlRequestEnum provides information to the client about whether an external control request is active on the crane and other information about external controls. See Table 27 for the possible values for the mode enumeration and their descriptions.
The parameter SpeedLimitGlobalEnabled provides information to the client whether a global speed limit has been requested by a client. TRUE if a limitation has been requested, otherwise FALSE.
The parameter SystemOn provides information to the client whether the main power supply and all subject systems are able to operate the crane in less than an approximate value of 10 seconds requiring no more than one operator action. TRUE if able to operate in less than 10 seconds, otherwise FALSE. This timing can be higher in some special applications.
The parameter SpeedLimitGlobalEnable is a read/write variable used to enable and/or disable any and all speed limitations for this specific CraneMotionDeviceSystemType. TRUE if speed limitations are to be obeyed, otherwise FALSE.
The ProtectiveFunctions folder contain information about crane functions which are designed to protect personnel, equipment, the environment and/or the crane itself, described in detail by ProtectiveFunctionType. The use case is similar to OPC 40010-1 ProtectiveStopFunctionType and EmergencyStopFunctionType (OPC Robotics), but with the additional capability to also represent functions which slow down motions (instead of stopping) or stop motions in one direction while still allowing it in the other direction.
Note: If possible each of the values given in 2:ParameterSet should be instantiated and referenced again from their respective FunctionalGroup (Operational or Configuration).