This document describes the basic infrastructure to model state machines. It defines ObjectTypes, VariableTypes and ReferenceTypes and explains how they should be used.
This document is an integral part of this standard, that is, the types defined in this document shall be used as defined. However, it is not required but strongly recommended that a Server uses these types to expose its state machines. The defined types may be subtyped to refine their behaviour.
When a Server exposes its state machine using the types defined in this document, it might only provide a simplified view on its internal state machine, hiding for example substates or putting several internal states into one exposed state.
The scope of the state machines described in this document is to provide an appropriate foundation for state machines needed for OPC 10000-9 and OPC 10000-10. It does not provide more complex functionality of a state machine like parallel states, forks and joins, history states, choices and junctions, etc. However, the base state machine defined in this document can be extended to support such concepts.
The following clauses describe examples of state machines, define state machines in the context of this document and define the representation of state machines in OPC UA. Finally, some examples of state machines, represented in OPC UA, are given.
The following example provides an overview of the base features that the state machines defined in this specification will support. In the following, a more complex example is given, that also supports sub-state machines.
Figure 1 gives an overview over a simple state machine. It contains the three states "State1", "State2" and "State3". There are transitions from "State1" to "State2", "State2" to "State2", etc. Some of the transitions provide additional information with regard to what causes (or triggers) the transition, for example the call of "Method1" for the transition from "State1" to "State2". The effect (or action) of the transition can also be specified, for example the generation of an Event of the "EventType1" in the same transition. The notation used to identify the cause is simply listing it on the transition, the effect is prefixed with a "/". More than one cause or effect are separated by a ",". Not every transition has to have a cause or effect, for example the transition between "State2" and "State3".
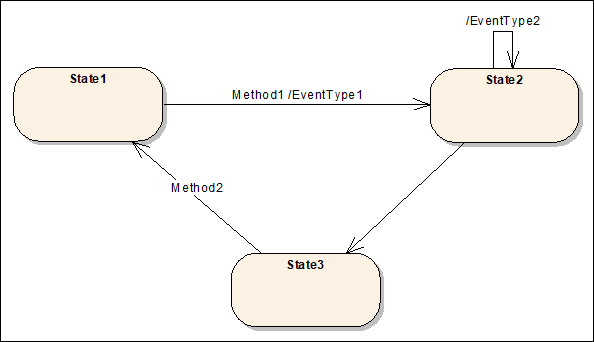
Figure 1 – Example of a simple state machine
For simplicity, the state machines described in this specification will only support causes in form of specifying Methods that have to be called and effects in form of EventTypes of Events that are generated. However, the defined infrastructure allows extending this to support additional different causes and effects.
Figure 2 shows an example of a state machine where "State6" is a sub-state-machine. This means, that when the overall state machine is in State6, this state can be distinguished to be in the sub-states "State7" or "State8". Sub-state-machines can be nested, that is, "State7" could be another sub-state-machine.
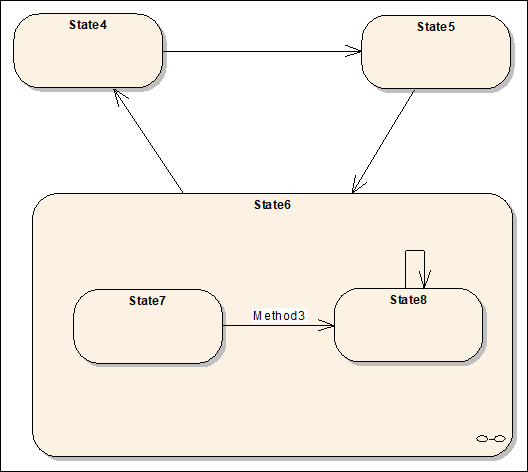
Figure 2 – Example of a state machine having a sub-machine
The infrastructure of state machines defined in this specification only deals with the basics of state machines needed to support OPC 10000-9 and OPC 10000-10. The intention is to keep the base simple but extensible.
For the state machines defined in this specification we assume that state machines are typed and instances of a type have their states and semantics specified by the type. For some types, this means that the states and transitions are fixed. For other types the states and transitions may be dynamic or unknown. A state machine where all the states are specified explicitly by the type is called a finite state machine.
Therefore, we distinguish between StateMachineType and StateMachine and their subtypes like FiniteStateMachineType. The StateMachineType specifies a description of the state machine, that is, its states, transitions, etc., whereas the StateMachine is an instance of the StateMachineType and only contains the current state.
Each StateMachine contains information about the current state. If the StateMachineType has SubStateMachines, the StateMachine also contains information about the current state of the SubStateMachines. StateMachines which have their states completely defined by the type are instances of a FiniteStateMachineType.
Each FiniteStateMachineType has one or more States. For simplicity, we do not distinguish between different States like the start or the end states.
Each State can have one or more SubStateMachines.
Each FiniteStateMachineType may have one or more Transitions. A Transition is directed and points from one State to another State.
Each Transition can have one or more Causes. A Cause leads a FiniteStateMachine to change its current State from the source of the Transition to its target. In this specification we only specify Method calls to be Causes of Transitions. Transitions do not have to have a Cause. A Transition can always be caused by some server-internal logic that is not exposed in the AddressSpace.
Each Transition can have one or more Effects. An Effect occurs if the Transition is used to change the State of a StateMachine. In this specification we only specify the generation of Events to be Effects of a Transition. A Transition is not required to expose any Effects in the AddressSpace.
Although this specification only specifies simple concepts for state machines, the provided infrastructure is extensible. If needed, special States can be defined as well as additional Causes or Effects.
The types defined in this specification are illustrated in Figure 3. The MyFiniteStateMachineType is a minimal example which illustrates how these Types can be used to describe a StateMachine. See OPC 10000-9 and OPC 10000-10 for additional examples of StateMachines.
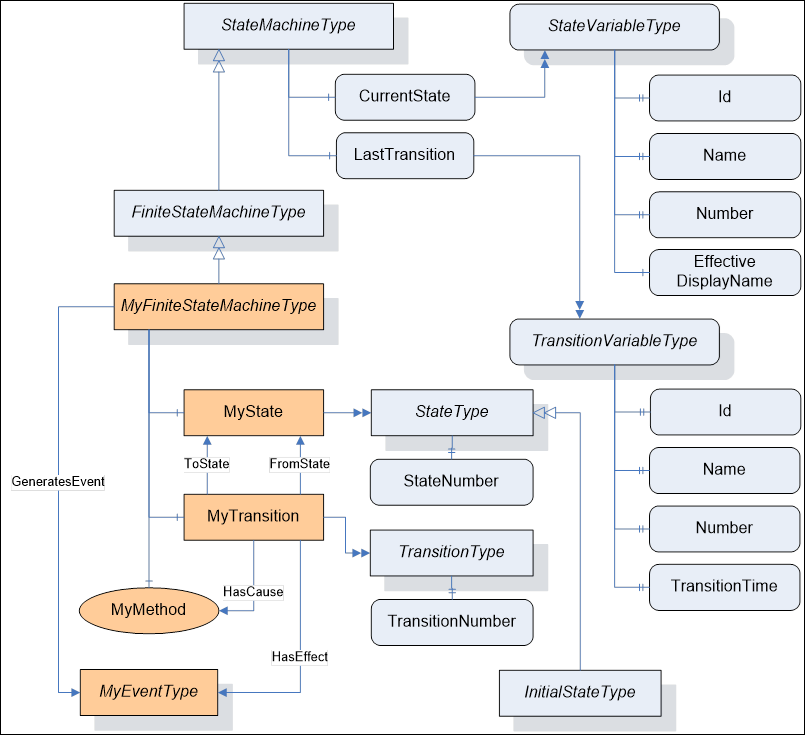
Figure 3 – The StateMachine Information Model
The StateMachineType is the base ObjectType for all StateMachineTypes. It defines a single Variable which represents the current state of the machine. An instance of this ObjectType shall generate an Event whenever a significant state change occurs. The Server decides which state changes are significant. Servers shall use the GeneratesEvent ReferenceType to indicate which Event(s) could be produced by the StateMachine.
Subtypes may add Methods which affect the state of the machine. The Executable Attribute is used to indicate whether the Method is valid given the current state of the machine. The generation of AuditEvents for Methods is defined in OPC 10000-4. A StateMachine may not be active. In this case, the CurrentState and LastTransition Variables shall have a status equal to Bad_StateNotActive (see Table 19).
Subtypes may add components which are instances of StateMachineTypes. These components are considered to be sub-states of the StateMachine. SubStateMachines are only active when the parent machine is in an appropriate state.
Events produced by SubStateMachines may be suppressed by the parent machine. In some cases, the parent machine will produce a single Event that reflects changes in multiple SubStateMachines.
FiniteStateMachineType is a subtype of StateMachineType that provides a mechanism to explicitly define the states and transitions. A Server should use this mechanism if it knows what the possible states are and the state machine is not trivial. The FiniteStateMachineType is defined in 4.4.6.
The StateMachineType is formally defined in Table 1.
Table 1 – StateMachineType definition
|
Attribute |
Value |
|||||
|
BrowseName |
StateMachineType |
|||||
|
IsAbstract |
False |
|||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
|
Subtype of the BaseObjectType defined in OPC 10000-5 |
||||||
|
HasSubtype |
ObjectType |
FiniteStateMachineType |
Defined in 4.4.6 |
|||
|
HasComponent |
Variable |
CurrentState |
LocalizedText |
StateVariableType |
Mandatory |
|
|
HasComponent |
Variable |
LastTransition |
LocalizedText |
TransitionVariableType |
Optional |
|
|
Conformance Units |
||||||
|
Base Info State Machine Instance |
||||||
CurrentState stores the current state of an instance of the StateMachineType. CurrentState provides a human readable name for the current state which may not be suitable for use in application control logic. Applications should use the Id Property of CurrentState if they need a unique identifier for the state.
LastTransition stores the last transition which occurred in an instance of the StateMachineType. LastTransition provides a human readable name for the last transition which may not be suitable for use in application control logic. Applications should use the Id Property of LastTransition if they need a unique identifier for the transition.
The StateVariableType is the base VariableType for Variables that store the current state of a StateMachine as a human readable name.
The StateVariableType is formally defined in Table 2.
Table 2 – StateVariableType definition
|
Attribute |
Value |
|||||
|
BrowseName |
StateVariableType |
|||||
|
DataType |
LocalizedText |
|||||
|
ValueRank |
−1 (−1 = Scalar) |
|||||
|
IsAbstract |
False |
|||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
|
Subtype of the BaseDataVariableType defined in OPC 10000-5 |
||||||
|
HasSubtype |
VariableType |
FiniteStateVariableType |
Defined in 4.4.7 |
|||
|
HasProperty |
Variable |
Id |
BaseDataType |
PropertyType |
Mandatory |
|
|
HasProperty |
Variable |
Name |
QualifiedName |
PropertyType |
Optional |
|
|
HasProperty |
Variable |
Number |
UInt32 |
PropertyType |
Optional |
|
|
HasProperty |
Variable |
EffectiveDisplayName |
LocalizedText |
PropertyType |
Optional |
|
|
HasProperty |
Variable |
ContinuationOptions |
DescriptionNodeIdDataType[] |
PropertyType |
Optional |
|
|
HasProperty |
Variable |
ExtendedInformation |
LocalizedText |
PropertyType |
Optional |
|
|
HasProperty |
Variable |
VendorCode |
String |
PropertyType |
Optional |
|
|
Conformance Units |
||||||
|
Base Info State Machine Instance |
||||||
Id is a name which uniquely identifies the current state within the StateMachineType. A subtype may restrict the DataType.
Name is a QualifiedName which uniquely identifies the current state within the StateMachineType.
Number is an integer which uniquely identifies the current state within the StateMachineType.
EffectiveDisplayName contains a human readable name for the current state of the state machine after taking the state of any SubStateMachines in account. There is no rule specified for which state or sub-state should be used. It is up to the Server and will depend on the semantics of the StateMachineType.
ContinuationOptions is an array of options that indicate possible next steps or actions that can be taken from the current state. Each option is represented as a description and a NodeId. The description is a human-readable description of the action, and the optional NodeId represents a Node that is involved in the continuation (e.g., a Method that can be invoked to transition to a new state).
ExtendedInformation provides additional, more detailed information about the current state or the available continuation options. The exact nature of this information depends on the specific implementation and use case.
VendorCode is an additional, vendor-specific identifier. It can be used to provide vendor-specific information about the current state or the available continuation options.
StateMachines produce Events which may include the current state of a StateMachine. In that case Servers shall provide the Name, Number and EffectiveDisplayName of the StateVariableType in the Event, even if they are not provided on the instances in the AddressSpace.
This structure contains the description and optionally a NodeId. It is used to provide a human-readable description of something plus optionally the NodeId in case the something is represented in the AddressSpace. The structure is defined in Table 3.
Table 3 – DescriptionNodeIdDataType Structure
|
Name |
Type |
Description |
|
DescriptionNodeIdDataType |
structure |
|
|
Description |
0:LocalizedText |
The human-readable description of something. |
|
NodeId |
0:NodeId |
Optionally provided NodeId, in case the referenced something is represented as Node in the AddressSpace. |
Its representation in the AddressSpace is defined in Table 4.
Table 4 – DescriptionNodeIdDataType Definition
|
Attribute |
Value |
|||||
|
BrowseName |
DescriptionNodeIdDataType |
|||||
|
IsAbstract |
False |
|||||
|
Description |
A human-readable description of something plus optionally the NodeId in case the something is represented in the AddressSpace |
|||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
Other |
|
|
Subtype of Structure defined in OPC 10000-5 |
||||||
|
Conformance Units |
||||||
|
Base Info State Machine DescriptionNodeIdDataType |
||||||
The TransitionVariableType is the base VariableType for Variables that store a Transition that occurred within a StateMachine as a human readable name.
The SourceTimestamp for the value specifies when the Transition occurred. This value may also be exposed with the TransitionTime Property.
The TransitionVariableType is formally defined in Table 5.
Table 5 – TransitionVariableType definition
|
Attribute |
Value |
|||||
|
BrowseName |
TransitionVariableType |
|||||
|
DataType |
LocalizedText |
|||||
|
ValueRank |
−1 (−1 = Scalar) |
|||||
|
IsAbstract |
False |
|||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
|
Subtype of the BaseDataVariableType defined in OPC 10000-5 |
||||||
|
HasSubtype |
VariableType |
FiniteTransitionVariableType |
Defined in 4.4.8 |
|||
|
HasProperty |
Variable |
Id |
BaseDataType |
PropertyType |
Mandatory |
|
|
HasProperty |
Variable |
Name |
QualifiedName |
PropertyType |
Optional |
|
|
HasProperty |
Variable |
Number |
UInt32 |
PropertyType |
Optional |
|
|
HasProperty |
Variable |
TransitionTime |
UtcTime |
PropertyType |
Optional |
|
|
HasProperty |
Variable |
EffectiveTransitionTime |
UtcTime |
PropertyType |
Optional |
|
|
Conformance Units |
||||||
|
Base Info State Machine Instance |
||||||
Id is a name which uniquely identifies a Transition within the StateMachineType. A subtype may restrict the DataType.
Name is a QualifiedName which uniquely identifies a transition within the StateMachineType.
Number is an integer which uniquely identifies a transition within the StateMachineType.
TransitionTime specifies when the transition occurred.
EffectiveTransitionTime specifies the time when the current state or one of its substates was entered. If, for example, a StateA is active and – while active – switches several times between its substates SubA and SubB, then the TransitionTime stays at the point in time where StateA became active whereas the EffectiveTransitionTime changes with each change of a substate.
The FiniteStateMachineType is the base ObjectType for StateMachines that explicitly define the possible States and Transitions. Once the States and Transitions are defined subtypes shall not add new States and Transitions (see 4.4.19). Subtypes may add causes or effects.
The States of the machine are represented with instances of the StateType ObjectType. Each State shall have a BrowseName which is unique within the StateMachine and shall have a StateNumber which shall also be unique across all States defined in the StateMachine. Be aware that States in a SubStateMachine may have the same StateNumber or BrowseName as States in the parent machine. A concrete subtype of FiniteStateMachineType shall define at least one State.
A StateMachine may define one State which is an instance of the InitialStateType. This State is the State that the machine goes into when it is activated.
The Transitions that may occur are represented with instances of the TransitionType. Each Transition shall have a BrowseName which is unique within the StateMachine and may have a TransitionNumber which shall also be unique across all Transitions defined in the StateMachine.
The initial State for a Transition is a StateType Object which is the target of a FromState Reference. The final State for a Transition is a StateType Object which is the target of a ToState Reference. The FromState and ToState References shall always be specified.
A Transition may produce an Event. The Event is indicated by a HasEffect Reference to a subtype of BaseEventType. The StateMachineType shall have GeneratesEvent References to the targets of a HasEffect Reference for each of its Transitions.
A FiniteStateMachineType may define Methods that cause a transition to occur. These Methods are targets of HasCause References for each of the Transitions that may be triggered by the Method. The Executable Attribute for a Method is used to indicate whether the current State of the machine allows the Method to be called.
A FiniteStateMachineType may have sub-state-machines which are represented as instances of StateMachineType ObjectTypes. Each State shall have a HasSubStateMachine Reference to the StateMachineType Object which represents the child States. The SubStateMachine is not active if the parent State is not active. In this case the CurrentState and LastTransition Variables of the SubStateMachine shall have a status equal to Bad_StateNotActive (see Table 19).
The FiniteStateMachineType is formally defined in Table 6.
Table 6 – FiniteStateMachineType definition
|
Attribute |
Value |
|||||
|
BrowseName |
FiniteStateMachineType |
|||||
|
IsAbstract |
True |
|||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
|
Subtype of the StateMachineType defined in 4.4.2 |
||||||
|
HasComponent |
Variable |
CurrentState |
LocalizedText |
FiniteStateVariableType |
Mandatory |
|
|
HasComponent |
Variable |
LastTransition |
LocalizedText |
FiniteTransitionVariableType |
Optional |
|
|
HasComponent |
Variable |
AvailableStates |
NodeId[] |
BaseDataVariableType |
Optional |
|
|
HasComponent |
Variable |
AvailableTransitions |
NodeId[] |
BaseDataVariableType |
Optional |
|
|
Conformance Units |
||||||
|
Base Info Finite State Machine Instance |
||||||
|
Base Info Available States and Transitions |
||||||
In some Servers an instance of a StateMachine may restrict the States and / or Transitions that are available. These restrictions may result from the internal design of the instance. For example, the StateMachine for an instrument’s limit alarm which only supports Hi and HiHi and can not produce a Low or LowLow. An instance of a StateMachine may also dynamically change the available States and/or Transitions based on its operating mode. For example, when a piece of equipment is in a maintenance mode the available States may be limited to some subset of the States available during normal operation.
The AvailableStates Variable provides a NodeId list of the States that are present in the StateMachine instance. The list may change during operation of the Server.
The AvailableTransitions Variable provides a NodeId list of the Transitions that are present in the StateMachine instance. The list may change during operation of the Server.
An example of a FiniteStateMachine type is shown in Figure 4.
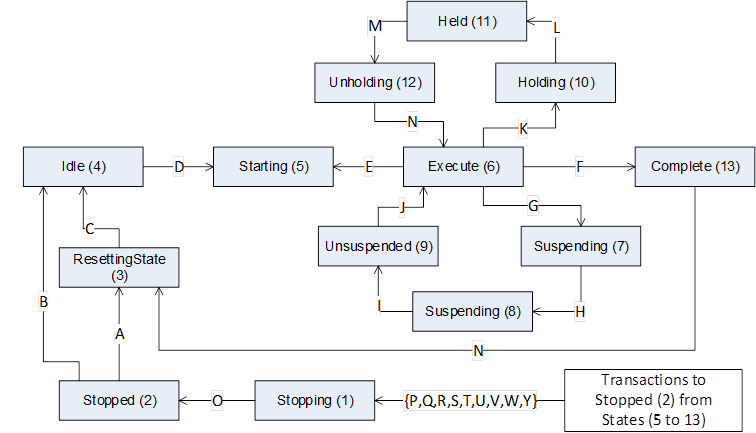
Figure 4 – Example of a FiniteStateMachine type
An example instance of the type is shown in Figure 5. In this example the States {7,8,9} and the Transitions {G,H,I,J} are not available in this instance.
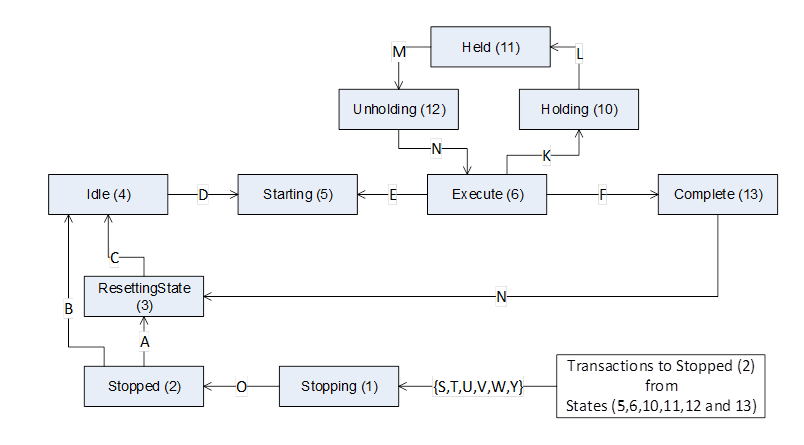
Figure 5 – Example of a FiniteStateMachine instance
The FiniteStateVariableType is a subtype of StateVariableType and is used to store the current state of a FiniteStateMachine as a human readable name.
The FiniteStateVariableType is formally defined in Table 7.
Table 7 – FiniteStateVariableType definition
|
Attribute |
Value |
|||||
|
BrowseName |
FiniteStateVariableType |
|||||
|
DataType |
LocalizedText |
|||||
|
ValueRank |
−1 (−1 = Scalar) |
|||||
|
IsAbstract |
False |
|||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
|
Subtype of the StateVariableType defined 4.4.3 |
||||||
|
HasProperty |
Variable |
Id |
NodeId |
PropertyType |
Mandatory |
|
|
Conformance Units |
||||||
|
Base Info Finite State Machine Instance |
||||||
Id is inherited from the StateVariableType and overridden to reflect the required DataType. This value shall be the NodeId of one of the State Objects of the FiniteStateMachineType. If the FiniteStateMachine is subtyped, it shall be the NodeId of the State defined on the supertype, i.e., where the State is defined the first time in the type hierarchy.
The Name Property is inherited from StateVariableType. Its Value shall be the BrowseName of one of the State Objects of the FiniteStateMachineType.
The Number Property is inherited from StateVariableType. Its Value shall be the StateNumber for one of the State Objects of the FiniteStateMachineType.
The FiniteTransitionVariableType is a subtype of TransitionVariableType and is used to store a Transition that occurred within a FiniteStateMachine as a human readable name.
The FiniteTransitionVariableType is formally defined in Table 8.
Table 8 – FiniteTransitionVariableType definition
|
Attribute |
Value |
||||
|
BrowseName |
FiniteTransitionVariableType |
||||
|
DataType |
LocalizedText |
||||
|
ValueRank |
−1 (−1 = Scalar) |
||||
|
IsAbstract |
False |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
Subtype of the TransitionVariableType defined in 4.4.5 |
|||||
|
HasProperty |
Variable |
Id |
NodeId |
PropertyType |
Mandatory |
|
Conformance Units |
|||||
|
Base Info Finite State Machine Instance |
|||||
Id is inherited from the TransitionVariableType and overridden to reflect the required DataType. This value shall be the NodeId of one of the Transition Objects of the FiniteStateMachineType. If the FiniteStateMachine is subtyped, it shall be the NodeId of the Transition defined on the supertype, i.e., where the Transition is defined the first time in the type hierarchy.
The Name Property is inherited from the TransitionVariableType. Its Value shall be the BrowseName of one of the Transition Objects of the FiniteStateMachineType.
The Number Property is inherited from the TransitionVariableType. Its Value shall be the TransitionNumber for one of the Transition Objects of the FiniteStateMachineType.
States of a FiniteStateMachine are represented as Objects of the StateType. Each Object of the StateType or one of its subtypes shall be referenced from the ObjectType FiniteStateMachineType or one of its subtypes using a HasComponent Reference or a subtype of HasComponent and shall not have a ModellingRule as they are not applied on the instances.
The StateType is formally defined in Table 9.
Table 9 – StateType definition
|
Attribute |
Value |
||||
|
BrowseName |
StateType |
||||
|
IsAbstract |
False |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
Subtype of the BaseObjectType defined in OPC 10000-5 |
|||||
|
HasProperty |
Variable |
StateNumber |
UInt32 |
PropertyType |
Mandatory |
|
HasSubtype |
ObjectType |
InitialStateType |
Defined in 4.4.10 |
||
|
HasSubtype |
ObjectType |
ChoiceStateType |
Defined in 4.6.2 |
||
|
Conformance Units |
|||||
|
Base Info Finite State Machine Instance |
|||||
The InitialStateType is a subtype of the StateType and is formally defined in Table 10. An Object of the InitialStateType represents the State that a FiniteStateMachine enters when it is activated. Each FiniteStateMachine can have at most one State of type InitialStateType, but a FiniteStateMachine does not have to have a State of this type.
A SubStateMachine goes into its initial state whenever the parent state is entered. However, a state machine may define a transition that goes directly to a state of the SubStateMachine. In this case the SubStateMachine goes into that State instead of the initial State. The two scenarios are illustrated in Figure 6. The transition from "State5" to "State6" causes the SubStateMachine to go into the initial State ("State7"), however, the transition from "State4" to "State8" causes the parent machine to go to "State6" and the SubStateMachine will go to "State8".
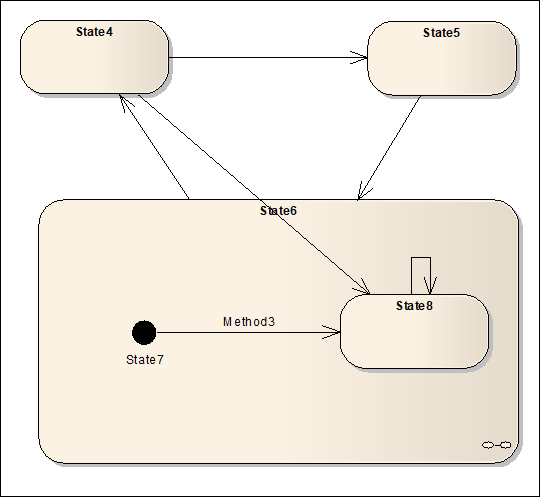
Figure 6 – Example of an initial State in a sub-machine
If no initial state for a SubStateMachine exists and the State having the SubStateMachine is entered directly, then the State of the SubStateMachine is server-specific.
Table 10 – InitialStateType definition
|
Attribute |
Value |
|||||
|
BrowseName |
InitialStateType |
|||||
|
IsAbstract |
False |
|||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
|
Conformance Units |
||||||
|
Base Info Finite State Machine Instance |
||||||
Transitions of a FiniteStateMachine are represented as Objects of the ObjectType TransitionType formally defined in Table 11. Each Object of the TransitionType or one of its subtypes shall be referenced from the ObjectType FiniteStateMachineType or one of its subtypes using a HasComponent Reference or a subtype of HasComponent and shall not have a ModellingRule as they are not applied on the instances.
Each valid Transition shall have exactly one FromState Reference and exactly one ToState Reference, each pointing to an Object of the ObjectType StateType.
Each Transition can have one or more HasCause References pointing to the cause that triggers the Transition.
Each Transition can have one or more HasEffect References pointing to the effects that occur when the Transition was triggered.
Table 11 – TransitionType definition
|
Attribute |
Value |
|||||
|
BrowseName |
TransitionType |
|||||
|
IsAbstract |
False |
|||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
|
Subtype of the BaseObjectType defined in OPC 10000-5 |
||||||
|
HasProperty |
Variable |
TransitionNumber |
UInt32 |
PropertyType |
Mandatory |
|
|
Conformance Units |
||||||
|
Base Info Finite State Machine Instance |
||||||
The FromState ReferenceType is a concrete ReferenceType and can be used directly. It is a subtype of NonHierarchicalReferences.
The semantic of this ReferenceType is to point from a Transition to the starting State the Transition connects.
The SourceNode of this ReferenceType shall be an Object of the ObjectType TransitionType or one of its subtypes. The TargetNode of this ReferenceType shall be an Object of the ObjectType StateType or one of its subtypes.
The representation of the FromState ReferenceType in the AddressSpace is specified in Table 12.
Table 12 – FromState ReferenceType
|
Attributes |
Value |
||
|
BrowseName |
FromState |
||
|
InverseName |
ToTransition |
||
|
Symmetric |
False |
||
|
IsAbstract |
False |
||
|
References |
NodeClass |
BrowseName |
Comment |
|
|
|
|
|
|
Conformance Units |
|||
|
Base Info Finite State Machine Instance |
|||
The ToState ReferenceType is a concrete ReferenceType and can be used directly. It is a subtype of NonHierarchicalReferences.
The semantic of this ReferenceType is to point from a Transition to the ending State the Transition connects.
The SourceNode of this ReferenceType shall be an Object of the ObjectType TransitionType or one of its subtypes. The TargetNode of this ReferenceType shall be an Object of the ObjectType StateType or one of its subtypes.
References of this ReferenceType may be only exposed uni-directional. Sometimes this is required, for example, if a Transition points to a State of a sub-machine.
The representation of the ToState ReferenceType in the AddressSpace is specified in Table 13.
Table 13 – ToState ReferenceType
|
Attributes |
Value |
||
|
BrowseName |
ToState |
||
|
InverseName |
FromTransition |
||
|
Symmetric |
False |
||
|
IsAbstract |
False |
||
|
References |
NodeClass |
BrowseName |
Comment |
|
|
|
|
|
|
Conformance Units |
|||
|
Base Info Finite State Machine Instance |
|||
The HasCause ReferenceType is a concrete ReferenceType and can be used directly. It is a subtype of NonHierarchicalReferences.
The semantic of this ReferenceType is to point from a Transition to something that causes the Transition. In this specification we only define Methods as Causes. However, the ReferenceType is not restricted to point to Methods. The referenced Methods can, but do not have to point to a Method of the StateMachineType. For example, it is allowed to point to a server-wide restart Method leading the state machine to go into its initial state.
The SourceNode of this ReferenceType shall be an Object of the ObjectType TransitionType or one of its subtypes. The TargetNode can be of any NodeClass.
The representation of the HasCause ReferenceType in the AddressSpace is specified in Table 14.
Table 14 – HasCause ReferenceType
|
Attributes |
Value |
||
|
BrowseName |
HasCause |
||
|
InverseName |
MayBeCausedBy |
||
|
Symmetric |
False |
||
|
IsAbstract |
False |
||
|
References |
NodeClass |
BrowseName |
Comment |
|
|
|
|
|
|
Conformance Units |
|||
|
Base Info Finite State Machine Instance |
|||
The HasEffect ReferenceType is a concrete ReferenceType and can be used directly. It is a subtype of NonHierarchicalReferences.
The semantic of this ReferenceType is to point from a Transition to something that will be effected when the Transition is triggered. In this specification we only define EventTypes as Effects. However, the ReferenceType is not restricted to point to EventTypes.
The SourceNode of this ReferenceType shall be an Object of the ObjectType TransitionType or one of its subtypes. The TargetNode can be of any NodeClass.
If the TargetNode is an EventType, each time the Transition is triggered (either by a Client or internally in the Server) an Event of that EventType or a subtype shall be generated.
The representation of the HasEffect ReferenceType in the AddressSpace is specified in Table 15.
Table 15 – HasEffect ReferenceType
|
Attributes |
Value |
||
|
BrowseName |
HasEffect |
||
|
InverseName |
MayBeEffectedBy |
||
|
Symmetric |
False |
||
|
IsAbstract |
False |
||
|
References |
NodeClass |
BrowseName |
Comment |
|
|
|
|
|
|
Conformance Units |
|||
|
Base Info Finite State Machine Instance |
|||
The HasSubStateMachine ReferenceType is a concrete ReferenceType and can be used directly. It is a subtype of NonHierarchicalReferences.
The semantic of this ReferenceType is to point from a State to an instance of a StateMachineType which represents the sub-states for the State.
The SourceNode of this ReferenceType shall be an Object of the ObjectType StateType. The TargetNode shall be an Object of the ObjectType StateMachineType or one of its subtypes. Each Object can be the TargetNode of at most one HasSubStateMachine Reference.
The SourceNode (the state) and the TargetNode (the SubStateMachine) shall belong to the same StateMachine. Therefore, the SourceNode shall be referenced from the ObjectType FiniteStateMachineType or one of its subtypes and the TargetNode shall be referenced from the same ObjectType, both using a HasComponent Reference or a subtype of HasComponent.
The representation of the HasSubStateMachine ReferenceType in the AddressSpace is specified in Table 16.
Table 16 – HasSubStateMachine ReferenceType
|
Attributes |
Value |
||
|
BrowseName |
HasSubStateMachine |
||
|
InverseName |
SubStateMachineOf |
||
|
Symmetric |
False |
||
|
IsAbstract |
False |
||
|
References |
NodeClass |
BrowseName |
Comment |
|
|
|
|
|
|
Conformance Units |
|||
|
Base Info Finite State Machine Instance |
|||
The TransitionEventType is a subtype of the BaseEventType. It can be used to generate an Event identifying that a Transition of a StateMachine was triggered. It is formally defined in Table 17.
Table 17 – TransitionEventType
|
Attribute |
Value |
|||||
|
BrowseName |
TransitionEventType |
|||||
|
IsAbstract |
True |
|||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
|
Subtype of the base BaseEventType defined in OPC 10000-5 |
||||||
|
HasComponent |
Variable |
Transition |
LocalizedText |
TransitionVariableType |
Mandatory |
|
|
HasComponent |
Variable |
FromState |
LocalizedText |
StateVariableType |
Mandatory |
|
|
HasComponent |
Variable |
ToState |
LocalizedText |
StateVariableType |
Mandatory |
|
|
Conformance Units |
||||||
|
Base Info Finite State Machine Instance |
||||||
The TransitionEventType inherits the Properties of the BaseEventType.
The inherited Property SourceNode shall be filled with the NodeId of the StateMachine instance where the Transition occurs. If the Transition occurs in a SubStateMachine, then the NodeId of the SubStateMachine has to be used. If the Transition occurs between a StateMachine and a SubStateMachine, then the NodeId of the StateMachine has to be used, independent of the direction of the Transition.
Transition identifies the Transition that triggered the Event.
FromState identifies the State before the Transition.
ToState identifies the State after the Transition.
The AuditUpdateStateEventType is a subtype of the AuditUpdateMethodEventType. It can be used to generate an Event identifying that a Transition of a StateMachine was triggered. It is formally defined in Table 18.
Table 18 – AuditUpdateStateEventType
|
Attribute |
Value |
|||||
|
BrowseName |
AuditUpdateStateEventType |
|||||
|
IsAbstract |
True |
|||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
|
Subtype of the AuditUpdateMethodEventType defined in OPC 10000-5 |
||||||
|
HasProperty |
Variable |
OldStateId |
BaseDataType |
PropertyType |
Mandatory |
|
|
HasProperty |
Variable |
NewStateId |
BaseDataType |
PropertyType |
Mandatory |
|
|
Conformance Units |
||||||
|
Auditing UpdateStates |
||||||
The AuditUpdateStateEventType inherits the Properties of the AuditUpdateMethodEventType.
The inherited Property SourceNode shall be filled with the NodeId of the StateMachine instance where the State changed. If the State changed in a SubStateMachine, then the NodeId of the SubStateMachine has to be used.
The SourceName for Events of this type should be the effect that generated the event (e.g. the name of a Method). If the effect was generated by a Method call, the SourceName should be the name of the Method prefixed with "Method/".
OldStateId reflects the Id of the state prior the change.
NewStateId reflects the new Id of the state after the change.
In general, all rules on subtyping apply for StateMachine types as well. Some additional rules apply for StateMachine types.
States and Transitions are not instantiated, this information is only provided on the ObjectType. They have no ModellingRule, and thus, also the inheritance of States and Transitions is not defined. Therefore, the following rules apply for subtyping StateMachines. Each State and Transition defined on the supertype shall be available on the subtype as well. That is, for each State defined on the supertype another Node of the same ObjectType having the same BrowseName and the same StateNumber shall be defined on the subtype. For each Transition defined on the supertype another Node of the same ObjectType having the same BrowseName and the same TransitionNumber shall be defined on the subtype. All references defining the StateMachine (HasCause, HasEffect, FromState, ToState, HasSubStateMachine, HasGuard) shall be replicated in the subtype as well. If InstanceDeclarations are referenced (e.g., Methods used to trigger Transitions) either the InstanceDeclaration of the supertype is referenced or the InstanceDeclaration is overridden, and in the latter case the overridden InstanceDeclaration of the subtype shall be referenced.
If a StateMachine type is not abstract, subtypes of it shall not change the behaviour of it. That means, that in this case a subtype shall not add States and it shall not add Transitions between its States. However, a subtype may add SubStateMachines, it may add Transitions from the States to the States of the SubStateMachine, and it may add Causes and Effects to a Transition. In addition, a subtype of a StateMachine type shall not remove States or Transitions.
In Table 19 specific StatusCodes used for StateMachines are defined.
Table 19 – Specific StatusCodes for StateMachines
|
Symbolic Id |
Description |
|
Bad_ StateNotActive |
The accessed state is not active. |
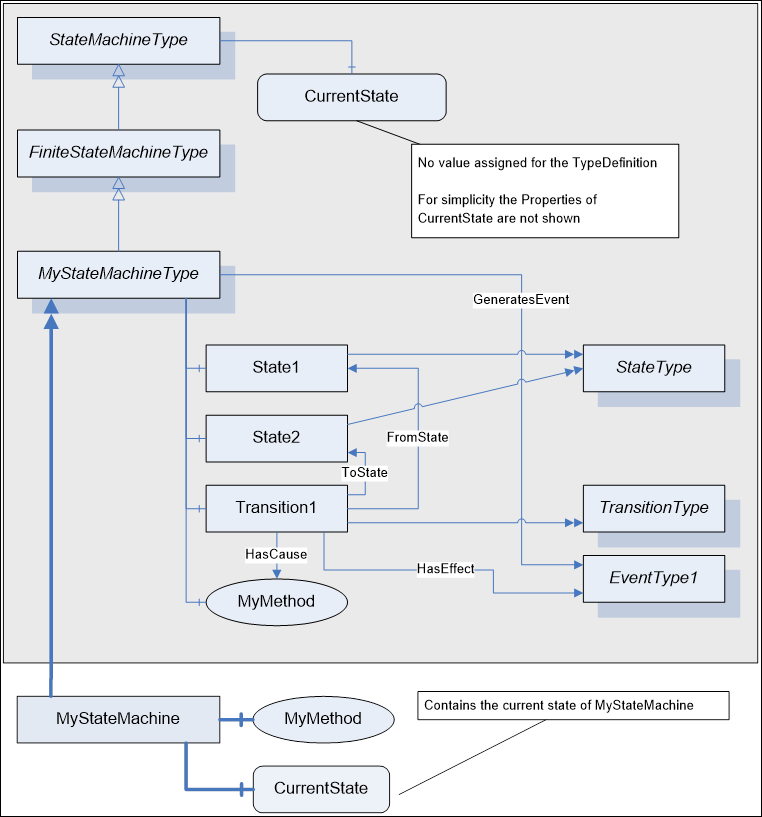
Figure 7 – Example of a StateMachineType using inheritance
In Figure 7 an example of a StateMachine is given using the Notation defined in OPC 10000-3. First, a new StateMachineType is defined, called "MyStateMachineType", inheriting from the base FiniteStateMachineType. It contains two States, "State1" and "State2" and a Transition "Transition1" between them. The Transition points to a Method "MyMethod" as the Cause of the Transition and an EventType "EventType1" as the Effect of the Transition.
Instances of "MyStateMachineType" can be created, for example "MyStateMachine". It has a Variable "CurrentState" representing the current State. The "MyStateMachine" Object only includes the Nodes which expose information specific to the instance.
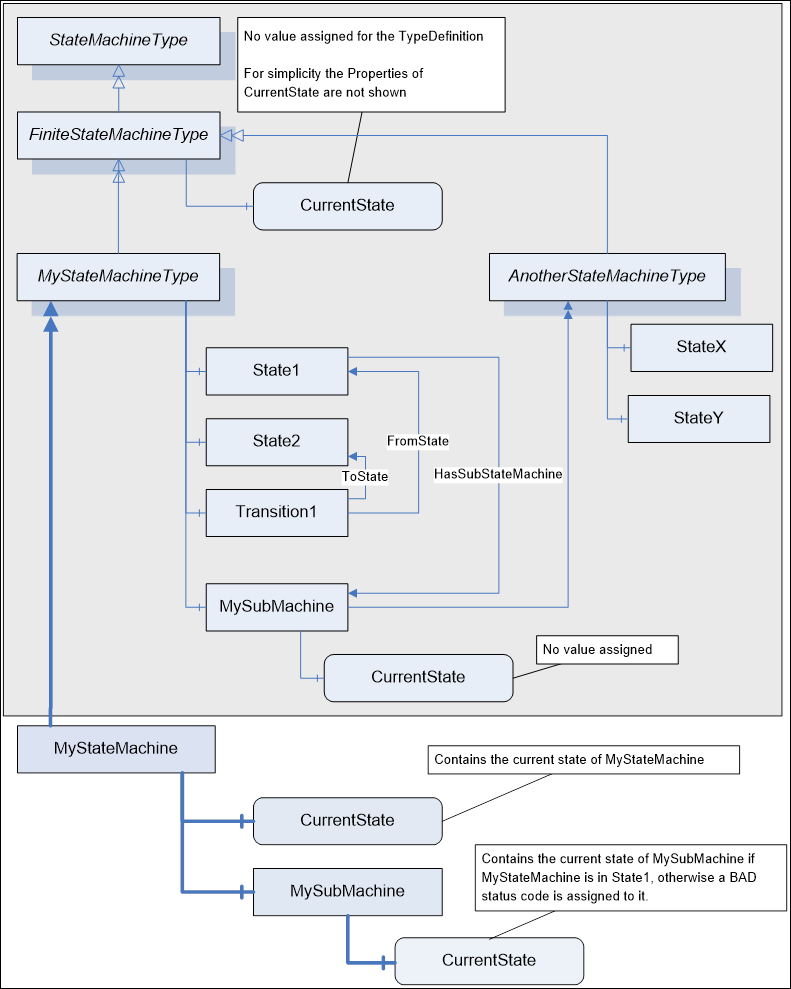
Figure 8 – Example of a StateMachineType with a SubStateMachine using inheritance
Figure 8 gives an example of a StateMachineType having a SubStateMachine for its "State1". For simplicity no effects and causes are shown, as well as type information for the States or ModellingRules.
The "MyStateMachineType" contains an Object "MySubMachine" of type "AnotherStateMachineType" representing a SubStateMachine. The "State1" references this Object with a HasSubStateMachine Reference, thus it is a SubStateMachine of "State1". Since "MySubMachine" is an Object of type "AnotherStateMachineType" it has a Variable representing the current State. Since it is used as an InstanceDeclaration, no value is assigned to this Variable.
An Object of "MyStateMachineType", called "MyStateMachine" has Variables for the current State, but also has an Object "MySubMachine" and a Variable representing the current state of the SubStateMachine. Since the SubStateMachine is only used when "MyStateMachine" is in "State1", a client would receive a Bad_StateNotActive StatusCode when reading the SubStateMachine CurrentState Variable if "MyStateMachine" is in a different State.
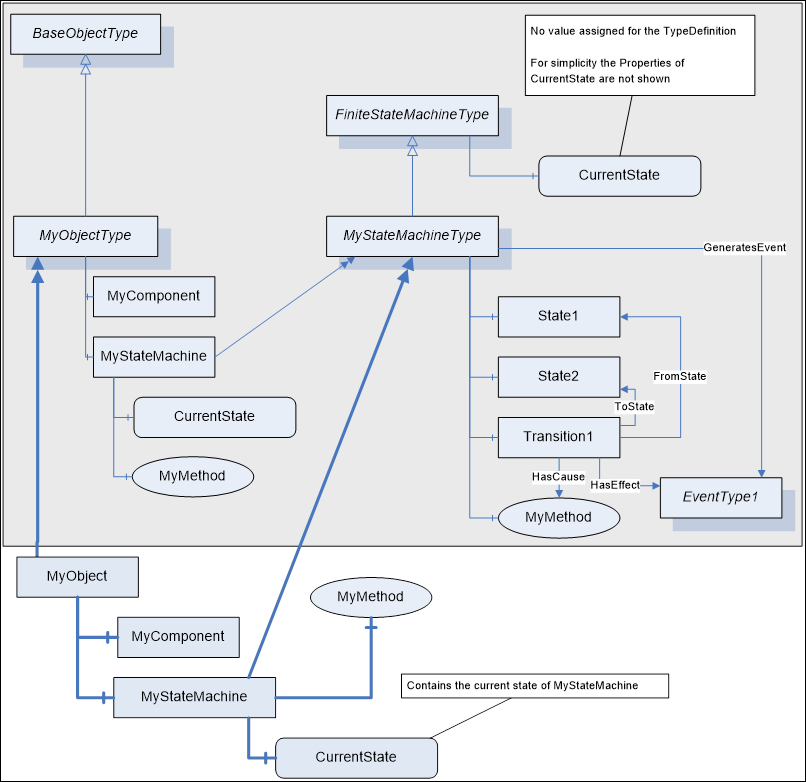
Figure 9 – Example of a StateMachineType using containment
Figure 9 gives an example of an ObjectType not only representing a StateMachine but also having some other functionality. The ObjectType "MyObjectType" has an Object "MyComponent" representing this other functionality. But it also contains a StateMachine "MyStateMachine" of the type "MyStateMachineType". Objects of "MyObjectType" also contain such an Object representing the StateMachine and a Variable containing the current state of the StateMachine, as shown in the Figure.
The StateMachines shown so far only had Transitions between States on the same level, that is, on the same StateMachine. Of cause, it is possible and often required to have Transitions between States of the StateMachine and States of its SubStateMachine.
Because a SubStateMachine can be defined by another StateMachineType and this type can be used in several places, it is not possible to add a bi-directional Reference from one of the shared States of the SubStateMachine to another StateMachine. In this case it is suitable to expose the FromState or ToState References uni-directional, that is, only pointing from the Transition to the State and not being able to browse to the other direction. If a Transition points from a State of a SubStateMachine to a State of another sub-machine, both, the FromState and the ToState Reference, are handled uni-directional.
A Client shall be able to handle the information of a StateMachine if the ToState and FromState References are only exposed as forward References and the inverse References are omitted.
Figure 10 gives an example of a state machine having a transition from a sub-state to a state.
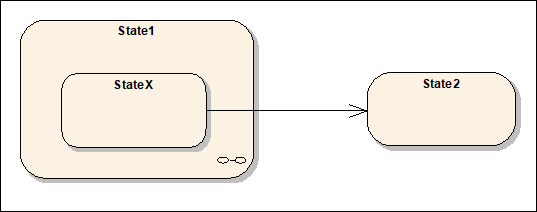
Figure 10 – Example of a StateMachine with Transitions from sub-states
In Figure 11 the representation of this example as StateMachineType in the AddressSpace is given. The "Transition1", part of the definition of "MyStateMachineType", points to the "StateX" of the StateMachineType "AnotherStateMachineType". The Reference is only exposed as forward Reference and the inverse Reference is omitted. Thus, there is no Reference from the "StateX" of "AnotherStateMachineType" to any part of "MyStateMachineType" and "AnotherStateMachineType" can be used in other places as well.
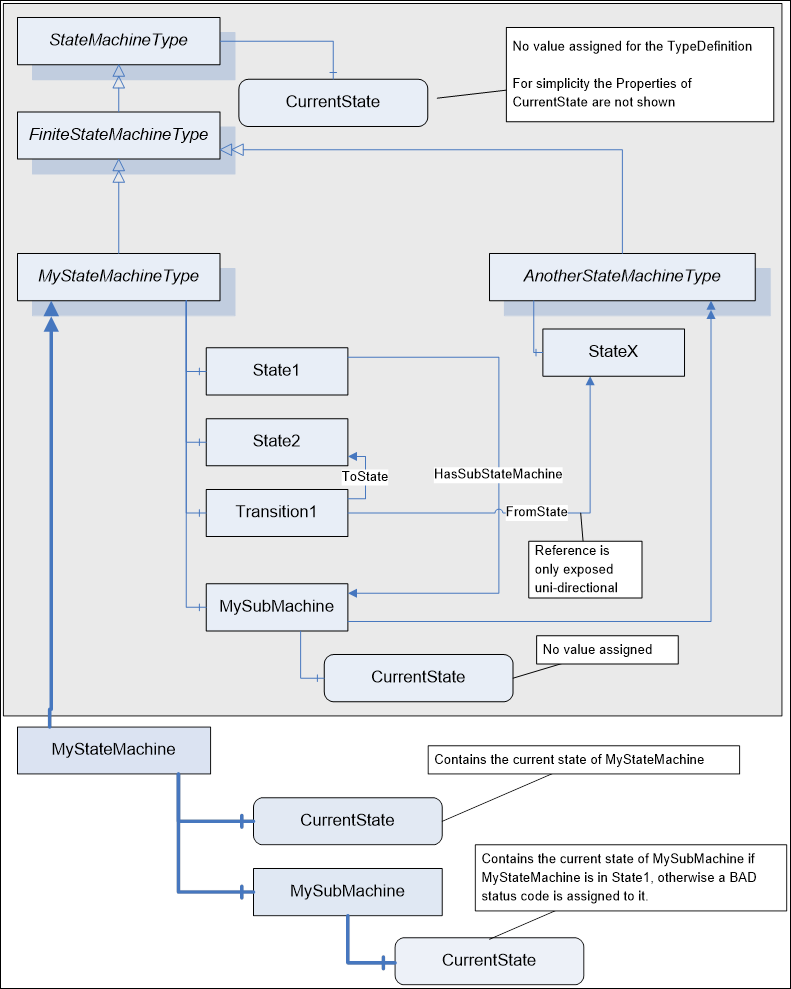
Figure 11 – Example of a StateMachineType having Transition to SubStateMachine
When a subtype of FiniteStateMachineType having States extends the StateMachine, it is not allowed to add additional States, but instead SubStateMachines can be added to existing States.
The example in Figure 12 shows a very simple StateMachine with two States.
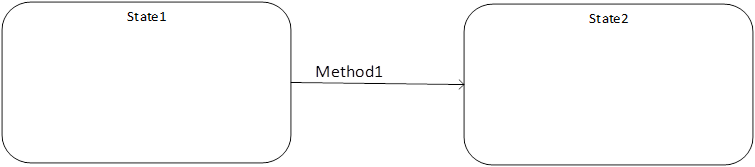
Figure 12 – Example of a StateMachine with two States
In Figure 13 the StateMachine of Figure 12 is extended by adding two substates to "State1".
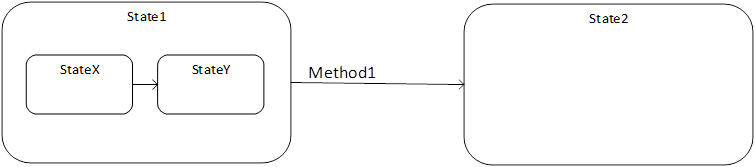
Figure 13 – Example of a StateMachine extended with two Substates
In Figure 14 the StateMachine of Figure 13 is extended by adding two substates to "State2", and an effect on the Transition between "State1" and "State2".
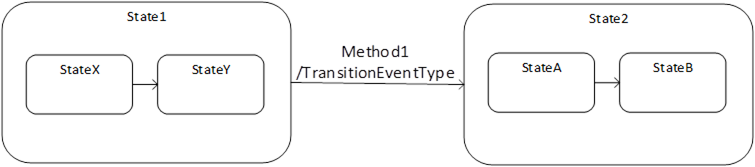
Figure 14 – Example of a StateMachine extended with another two Substates
In Figure 15 the representation of this example as StateMachineType in the AddressSpace is given. The “MyStateMachineType” defines the StateMachine of Figure 12, and the “MySubStateMachineType” is a subtype and extends the StateMachine with a SubStateMachine as defined in Figure 13. The “MySubSubStateMachineType” is another subtype as defined in Figure 14.
The States and Transitions of "MyStateMachineType” are replicated to "MySubStateMachineType" and "MySubSubStateMachineType". Since "Method1” is not overridden, the "Transition1" of all three types is referencing the Method of "MyStateMachineType”. In "MySubStateMachineType”, a SubStateMachine for "State1" was added, and in "MySubSubStateMachineType" a SubStateMachine for "State2". In addition, "MySubSubStateMachineType" adds an effect to "Transition1".
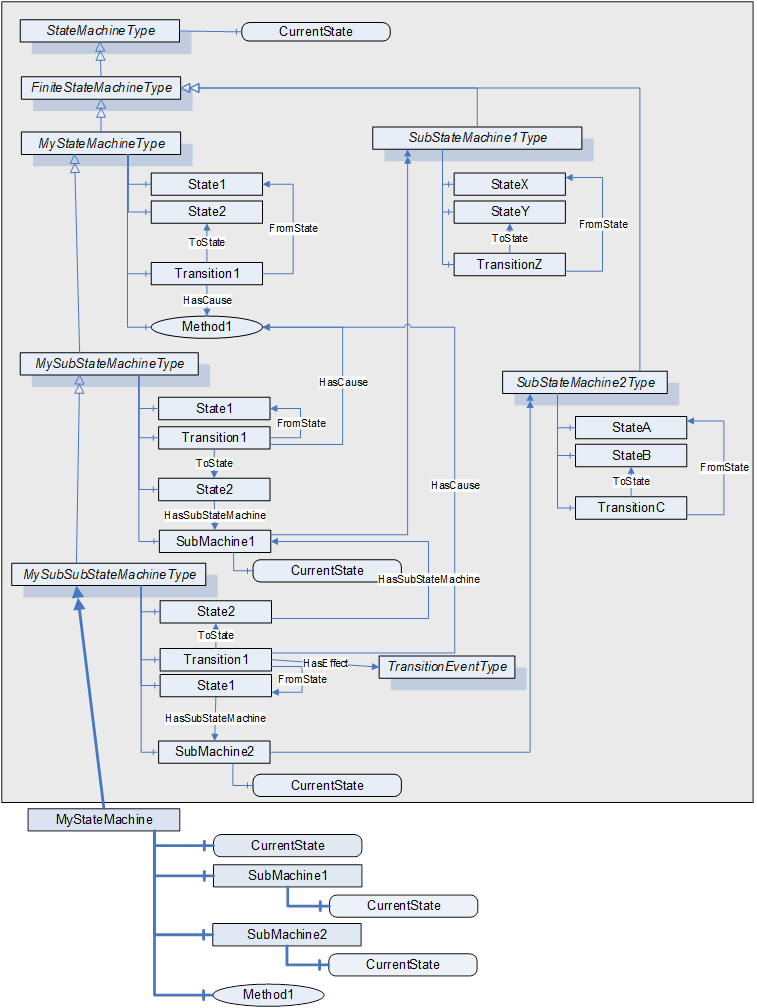
Figure 15 – Example of a StateMachineType adding SubStateMachines in Subtypes
This section describes extensions to the StateMachine model allowing choices and guards on StateMachines.
The ChoiceStateType is a subtype of the StateType and is formally defined in Table 20. An Object of the ChoiceStateType represents a pseudo state that is directly exited when it is entered. The Guards defined on the Transitions from the ChoiceState determine which Transition is used. The Guards shall be defined in a way that at least one Guard is true and a Transition can be determined. If this is not the case, the StateMachine is non-well formed. To avoid this, the specific ElseGuardVariableType can be used, which is only "true" if all other Guards on a ChoiceState are "false". If several Guards are "true", only one of those Transitions is used. The algorithm to determine the Transition is server-specific.
A sample StateMachine using a ChoiceState is given in Figure 16. It provides a simplified representation of a robot. When the StateMachine is in the S1_Initial state, calling the Load() Method loads a program to the robot and triggers the Transition into the ChoiceState (CS). In the ChoiceState the Guards are validated and in case the robot is on the correct position for the loaded program (validated by the guard OnPath = True) the State S3_Ready is entered. In case the robot is not in the correct position (Else) the S2_Loaded State is entered. In that State, the Prepare() Method puts the robot in the correct position, and triggers the Transition to S3_Ready. If the robot is ready, it can be started. While it is running, it can be stopped. If the program is finished, the robot goes back to either the loaded or ready state, depending on its position, using the ChoiceState, again.
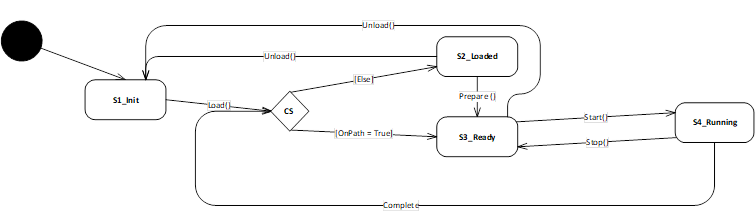
Figure 16 – Example of a ChoiceState
As the ChoiceState is directly exited after it is entered there shall be no trigger (using the HasCause ReferenceType or a subtype) defined on any leaving Transition (Transitions referencing the ChoiceState with the FromState Reference or a subtype).
|
Attribute |
Value |
|||||
|
BrowseName |
ChoiceStateType |
|||||
|
IsAbstract |
False |
|||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
|
Conformance Units |
||||||
|
Base Info Choice States |
||||||
The HasGuard ReferenceType is a concrete ReferenceType and can be used directly. It is a subtype of HasComponent.
The semantic of this ReferenceType is to point from a Transition to a Guard. The Guard indicates if the Transition can be used or not (see GuardVariableType). A Transition can only be used, if the Guard is "True". A Transition can point to several Guards. In that case, all Guards need to be "True" before the Transition can be used. If there is no Guard, the Transition can always be used (considered as if all Guards are "True").
The SourceNode of this ReferenceType shall be an Object of the ObjectType TransitionType or one of its subtypes. The TargetNode shall be a Variable of the VariableType GuardVariableType or one of its subtypes.
The representation of the HasGuard ReferenceType in the AddressSpace is specified in Table 21.
Table 21 – HasGuard ReferenceType
|
Attribute |
Value |
|||||
|
BrowseName |
HasGuard |
|||||
|
InverseName |
GuardOf |
|||||
|
Symmetric |
False |
|||||
|
IsAbstract |
False |
|||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
|
Subtype of the HasComponent ReferenceType defined in OPC 10000-5 |
||||||
|
Conformance Units |
||||||
|
Base Info Choice States |
||||||
The GuardVariableType provides the information of a Guard of a Transition in a StateMachine. A Guard indicates, if the Transition can be used or not. The Guard defines a semantic that can be evaluated to "True" or "False". Only if the semantic is "True", the Transition connected via a HasGuard Reference can be used. The value of the GuardVariableType provides the semantic of the Guard in a human-readable way, that can be used to display the StateMachine.
This base GuardVariableType does not define a machine-readable semantic of the Guard. The calculation, if the Guard is "True" or "False" is server-specific. Subtypes of this VariableType do define concrete machine-readable semantics.
The GuardVariableType is formally defined in Table 22.
Table 22 – GuardVariableType definition
|
Attribute |
Value |
||||
|
BrowseName |
GuardVariableType |
||||
|
DataType |
LocalizedText |
||||
|
ValueRank |
−1 (−1 = Scalar) |
||||
|
IsAbstract |
False |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
Subtype of the BaseDataVariableType defined in OPC 10000-5 |
|||||
|
HasSubtype |
VariableType |
ElseGuardVariableType |
Defined in 4.6.6 |
||
|
HasSubtype |
VariableType |
ExpressionGuardVariableType |
Defined in 4.6.5 |
||
|
Conformance Units |
|||||
|
Base Info Choice States |
|||||
The ExpressionGuardVariableType provides, in addition to the human-readable semantic from its GuardVariableType, a machine interpretable representation on the semantic.
The ExpressionGuardVariableType is formally defined in Table 23.
Table 23 – ExpressionGuardVariableType definition
|
Attribute |
Value |
||||||
|
BrowseName |
ExpressionGuardVariableType |
||||||
|
DataType |
LocalizedText |
||||||
|
ValueRank |
−1 (−1 = Scalar) |
||||||
|
IsAbstract |
False |
||||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
||
|
Subtype of the GuardVariableType defined in 4.6.4 |
|||||||
|
HasProperty |
Variable |
Expression |
ContentFilter |
PropertyType |
Mandatory |
||
|
Conformance Units |
|||||||
|
Base Info Choice States |
|||||||
The mandatory Property Expression provides a ContentFilter, that shall be evaluated on the Object the StateMachine belongs to. This is a machine-readable semantic of the Guard. If the ContentFilter evaluates to "True", the Guard is "True", otherwise the Guard is "False".
The ContentFilter for ExpressionGuardVariableType is restricted to basic operators (see OPC 10000-4 for details).
The ContentFilter can reference any Variables defined on the StateMachineType and are validated on the instance of the StateMachine. If the definition of the Variable is not owned directly by the StateMachine but for example some other type, the StateMachine instance shall reference that Variable.
The ElseGuardVariableType is a specialization of the GuardVariableType defining a concrete semantic for the Guard. The value of the Guard should always be {"en", "Else"} or a translation of this. The ElseGuardVariableType shall only be used on pseudo states like the ChoiceStateType. That means, that it shall only be referenced from Transitions having such a StateType as SourceNode. The ElseGuardVariableType shall only be used once for each State. That means, that each State shall at most have one Transition (referenced as SourceNode) referencing an ElseGuardVariableType. The ElseGuardVariableType shall be the only Guard of a Transition. That means, if a Transition references an instance of an ElseGuardVariableType, it shall not reference any other Guards.
The semantic of the ElseGuardVariableType is, that if a pseudo state is reached and no other Transition exists on the State where all its Guards are validated to "True", this Guards validates to "True" and thus its Transition is used.
The ElseGuardVariableType is formally defined in Table 24.
Table 24 – ElseGuardVariableType definition
|
Attribute |
Value |
||||
|
BrowseName |
ElseGuardVariableType |
||||
|
DataType |
LocalizedText |
||||
|
ValueRank |
−1 (−1 = Scalar) |
||||
|
IsAbstract |
False |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
Subtype of the GuardVariableType defined in 4.6.4 |
|||||
|
Conformance Units |
|||||
|
Base Info Choice States |
|||||
Taking the sample StateMachine of Figure 16 its representation in the OPC UA AddressSpace is shown in Figure 17 as RobotStateMachineType. The Transition T2 between the ChoiceState and S2_Loaded has the Guard "Else" of ElseGuardVariableType and the Transition T3 between the ChoiceState and S3_Ready has the Guard "OnPathTrue" having an "Expression" Property (not shown in the figure). The ContentFilter of the Expression references to the ProgramLoaded Variable of the RobotStateMachineType. When the ChoiceState is entered on an instance of the RobotStateMachineType like MyStateMachine in Figure 17, the concrete Variable of the instance is used to evaluate the ContentFilter. The value of the Expression is in the sample an array with one entry, using the FilterOperator Equal_0 and the filterOperands are the SimpleOperand OnPath and the Literal value "True".
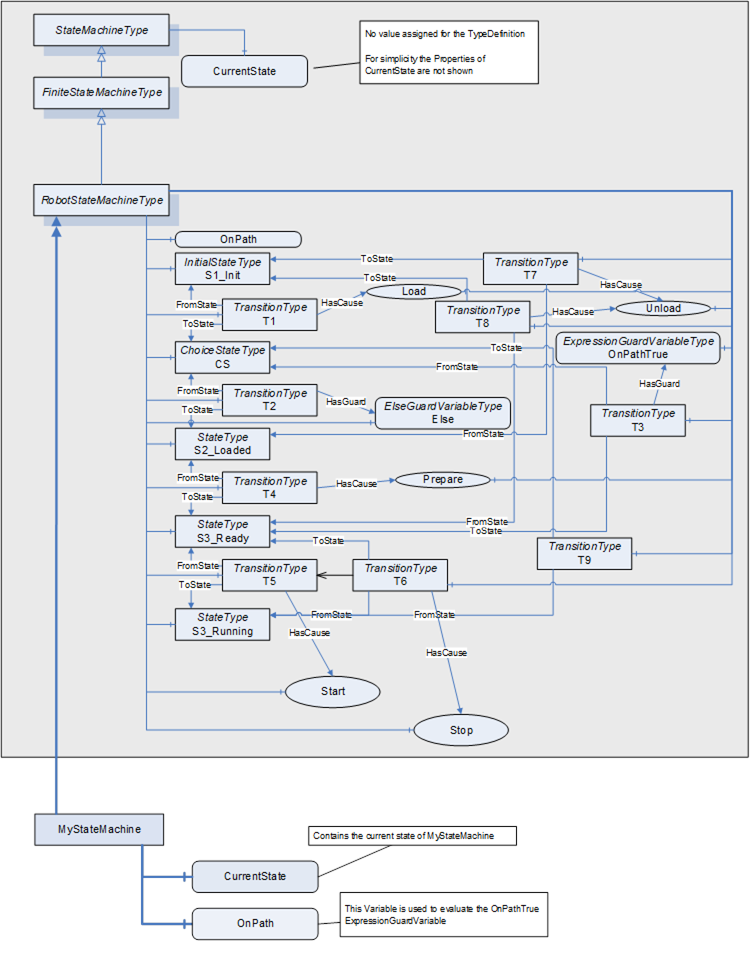
Figure 17 – Example of a StateMachine using ChoiceState and Guards
__________