This ObjectType defines the representation of a machine vision system. Figure 8 shows the hierarchical structure and details of the composition. It is formally defined in Table 10.
Instances of this ObjectType provide a general communication interface for a machine vision system. This interface makes it possible to interact with this system independent of the knowledge of the internal structure and the underlying processes of the machine vision system.
System behavior is modeled with a mandatory hierarchical finite state machine.
VisionSystemType contains four optional management objects, RecipeManagement, ConfigurationManagement, ResultManagement, and SafetyStateManagement. All of these provide access to the exposed functionality of the machine vision system.
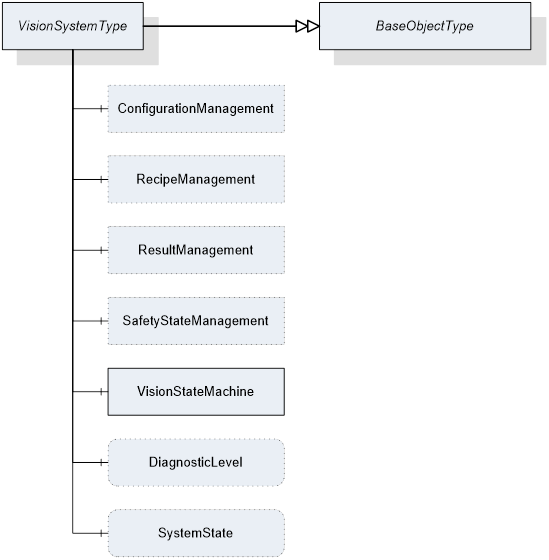
Figure 8 – Overview VisionSystemType
Table 10 – Definition of VisionSystemType
|
Attribute |
Value |
||||
|
BrowseName |
VisionSystemType |
||||
|
IsAbstract |
False |
||||
|
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
ModellingRule |
|
Subtype of the BaseObjectType defined in OPC 10000-5 |
|||||
|
HasComponent |
Object |
ConfigurationManagement |
-- |
ConfigurationManagementType |
Optional |
|
HasComponent |
Object |
RecipeManagement |
-- |
RecipeManagementType |
Optional |
|
HasComponent |
Object |
ResultManagement |
-- |
ResultManagementType |
Optional |
|
HasComponent |
Object |
SafetyStateManagement |
-- |
SafetyStateManagementType |
Optional |
|
HasComponent |
Object |
VisionStateMachine |
-- |
VisionStateMachineType |
Mandatory |
|
HasComponent |
Variable |
DiagnosticLevel |
UInt16 |
BaseDataVariableType |
Optional |
|
HasComponent |
Variable |
SystemState |
SystemStateDescriptionDataType |
BaseDataVariableType |
Optional |
ConfigurationManagement providesConfigurationManagement provides methods and properties required for Section 7.2.
RecipeManagement provides functionality to add, remove, prepare, and retrieve vision system recipes. RecipeManagementType is described in Section 7.5.
ResultManagement provides methods and properties necessary for managing the results. ResultManagementType is described in Section 7.10.
SafetyStateManagement provides functionality to inform the vision system about the change of an external safety state. SafetyStateManagementType is described in Section 7.13.
StateMachine provides information about the current state of the vision system and methods for controlling it. VisionStateMachineType is defined in Section 8.2.
DiagnosticLevel specifies the threshold for the severity of diagnostic messages to be generated by the server. More information can be found in Section 11.3.
SystemState represents the system state in terms of the SEMI E10 standard. More information can be found in Section11.6.