The foundation of AutomationML is the application of CAEX as the top level format. Furthermore, AutomationML defines an appropriate CAEX profile fulfilling all relevant needs of AutomationML to model engineering information of production systems. It integrates the three data formats CAEX, COLLADA, and PLCopenXML, and enables an extension, if necessary, in the future.
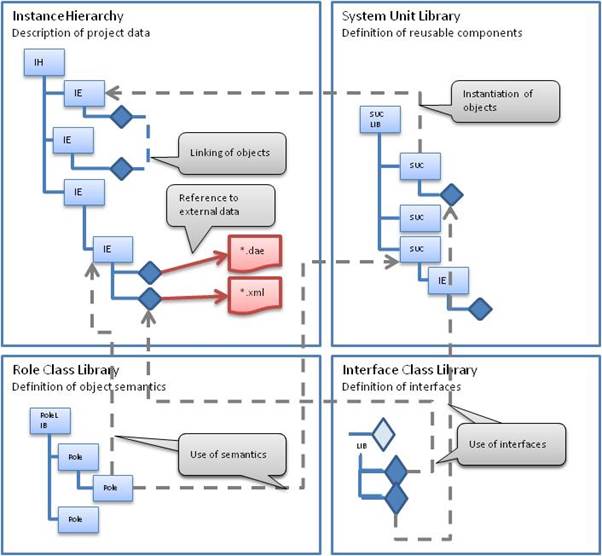
CAEX enables an object oriented approach (see Figure 2) where
- semantics of system objects can be specified using roles defined and collected in role class libraries,
- semantics of interfaces between system objects can be specified using interface classes defined and collected in interface class libraries,
- classes of system objects can be specified using system unit classes (SUC) defined and collected in system unit class libraries, and
- individual objects are modelled in an instance hierarchy (IH) as a hierarchy of internal elements (IE) referencing system unit classes they are derived from, role classes defining its semantics, and interface objects used to interlink objects among each other or with externally modelled information (e.g. COLLADA and PLCopenXML files).