The AxisType describes an axis of a motion device. It is formally defined in Table 15.
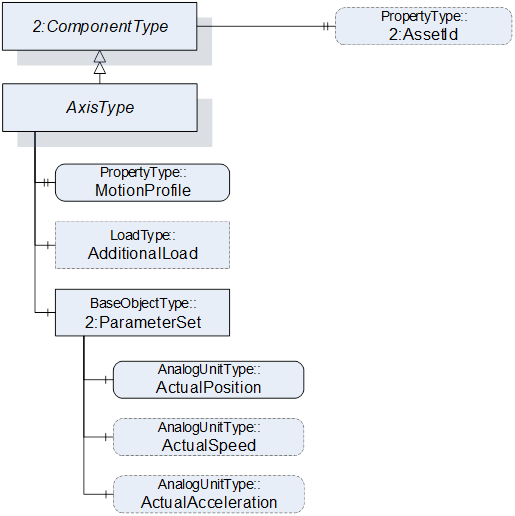
Table 15 – AxisType Definition
|
Attribute |
Value |
||||
|
BrowseName |
AxisType |
||||
|
IsAbstract |
False |
||||
|
References |
Node Class |
BrowseName |
DataType |
TypeDefinition |
Other |
|
Subtype of the ComponentType defined in OPC Unified Architecture for Devices (DI), inheriting the InstanceDeclarations of that Node |
|||||
|
0:HasProperty |
Variable |
MotionProfile |
AxisMotionProfileEnumeration |
0:PropertyType |
M |
|
0:HasComponent |
Object |
AdditionalLoad |
|
LoadType |
O |
|
0:HasComponent |
Object |
2:ParameterSet |
|
0:BaseObjectType |
M |
|
Requires |
Object |
<PowerTrainIdentifier> |
|
PowerTrainType |
OP |
|
0:HasProperty |
Variable |
2:AssetId |
0:String |
0:PropertyType |
O |
|
Conformance Units |
|||||
|
Rob MotionDeviceSystem Base |
|||||
|
Rob Axis AM Extended |
|||||
|
Rob Axis CM Extended |
|||||
|
Rob Axis AdditionalLoad |
|||||
The components of the AxisType have additional subcomponents which are defined in Table 16.
Table 16 – AxisType Additional Subcomponents
|
Source Path |
Reference |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
Others |
|
2:ParameterSet |
0:HasComponent |
Variable |
ActualPosition |
0:Double |
0:AnalogUnitType |
M |
|
2:ParameterSet |
0:HasComponent |
Variable |
ActualSpeed |
0:Double |
0:AnalogUnitType |
O |
|
2:ParameterSet |
0:HasComponent |
Variable |
ActualAcceleration |
0:Double |
0:AnalogUnitType |
O |
The AssetId property is a user writable alphanumeric character sequence uniquely identifying a component. The vendor, integrator or user of the device provides the ID. It contains typically an identifier in a branch, use case or user specific naming scheme. This could be for example a reference to an electric scheme. For electric schemes typically EN 81346-2 is used. The AssetId of the AxisType provides a manufacturer-specific axis identifier within the control system. This property is defined by ComponentType defined in OPC 10000-100.
The MotionProfile property provides the kind of axis motion as defined by the AxisMotionProfileEnumeration (10.2)
AdditionalLoad provides data for the load that is mounted on this axis, e.g., a transformer for welding.
The Requires reference provides the relationship of axes to power trains. For complex kinematics this does not need to be a one-to-one relationship, because more than one power train might influence the motion of one axis. This reference connects all power trains to an axis that must be actively driven when only this axis should move and all other axes should stand still.
Virtual axes that are not actively driven by a power train do not have this reference. The InverseName is IsRequiredBy.
Description of ParameterSet of AxisType:
- Variable ActualPosition: The ActualPosition variable provides the current position of the axis and may have limits. If the axis has physical limits, the EURange property of the AnalogUnitType shall be provided.
- Variable ActualSpeed: The ActualSpeed variable provides the axis speed. Applicable speed limits of the axis shall be provided by the EURange property of the AnalogUnitType.
- Variable ActualAcceleration: The ActualAcceleration variable provides the axis acceleration. Applicable acceleration limits of the axis shall be provided by the EURange property of the AnalogUnitType.