The ControllerType describes the control unit of motion devices. One motion device system can have one or more instances of the ControllerType. The ControllerType is formally defined in Table 95.
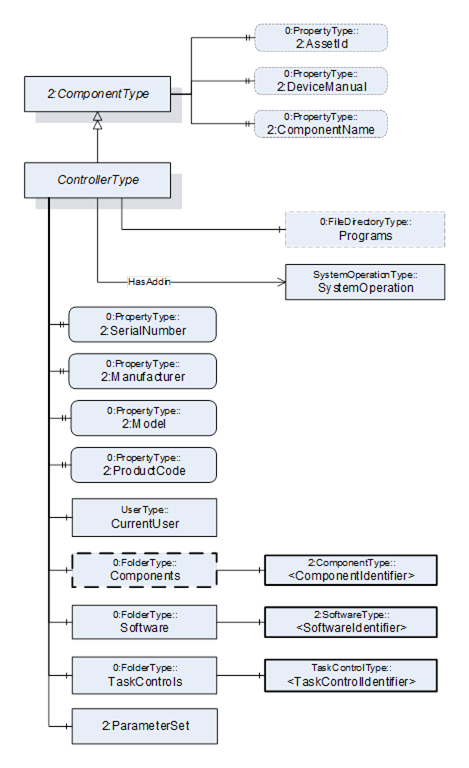
Figure 25 – Overview ControllerType
Table 95 – ControllerType Definition
|
Attribute |
Value |
||||
|
BrowseName |
ControllerType |
||||
|
IsAbstract |
False |
||||
|
References |
Node Class |
BrowseName |
DataType |
TypeDefinition |
Modelling Rule |
|
Subtype of the ComponentType defined in OPC Unified Architecture for Devices (DI) |
|||||
|
0:HasProperty |
Variable |
2:SerialNumber |
0:String |
0:PropertyType |
M |
|
0:HasProperty |
Variable |
2:Manufacturer |
0:LocalizedText |
0:PropertyType |
M |
|
0:HasProperty |
Variable |
2:Model |
0:LocalizedText |
0:PropertyType |
M |
|
0:HasProperty |
Variable |
2:ProductCode |
0:String |
0:PropertyType |
M |
|
0:HasComponent |
Object |
CurrentUser |
|
UserType |
M |
|
0:HasComponent |
Object |
Components |
|
0:FolderType |
O |
|
0:HasComponent |
Object |
Software |
|
0:FolderType |
M |
|
0:HasComponent |
Object |
TaskControls |
|
0:FolderType |
M |
|
0:HasComponent |
Object |
2:ParameterSet |
|
0:BaseObjectType |
O |
|
HasSafetyStates |
Object |
<SafetyStatesIdentifier> |
|
SafetyStateType |
OP |
|
0:HasComponent |
Object |
Programs |
|
0:FileDirectoryType |
O |
|
0:HasAddIn |
Object |
SystemOperation |
|
SystemOperationType |
O |
|
Controls |
Object |
<MotionDeviceIdentifier> |
|
MotionDeviceType |
OP |
|
0:HasProperty |
Variable |
2:AssetId |
0:String |
0:PropertyType |
O |
|
0:HasProperty |
Variable |
2:DeviceManual |
0:String |
0:PropertyType |
O |
|
0:HasProperty |
Variable |
2:ComponentName |
0:LocalizedText |
0:PropertyType |
O |
|
Conformance Units |
|||||
|
Rob System Monitor |
|||||
|
Rob System Operation |
|||||
|
Rob Program File Directory |
|||||
|
Rob System Events |
|||||
|
Rob Controller AM Extended |
|||||
|
Rob Controller AM Extended |
|||||
|
Rob MotionDeviceSystem Base |
|||||
The components of the ControllerType have additional subcomponents which are defined in Table 96.
Table 96 – ControllerType Additional Subcomponents
|
Source Path |
Reference |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
Others |
|
Components |
0:HasComponent |
Object |
<ComponentIdentifier> |
|
2:ComponentType |
MP |
|
Software |
0:HasComponent |
Object |
<SoftwareIdentifier> |
|
2:SoftwareType |
MP |
|
TaskControls |
0:HasComponent |
Object |
<TaskControlIdentifier> |
|
TaskControlType |
MP |
|
2:ParameterSet |
0:HasComponent |
Variable |
TotalPowerOnTime |
0:DurationString |
0:BaseDataVariableType |
O |
|
2:ParameterSet |
0:HasComponent |
Variable |
StartUpTime |
0:DateTime |
0:BaseDataVariableType |
O |
|
2:ParameterSet |
0:HasComponent |
Variable |
UpsState |
0:String |
0:BaseDataVariableType |
O |
|
2:ParameterSet |
0:HasComponent |
Variable |
TotalEnergyConsumption |
0:Double |
0:AnalogUnitType |
O |
|
2:ParameterSet |
0:HasComponent |
Variable |
CabinetFanSpeed |
0:Double |
0:AnalogUnitType |
O |
|
2:ParameterSet |
0:HasComponent |
Variable |
CPUFanSpeed |
0:Double |
0:AnalogUnitType |
O |
|
2:ParameterSet |
0:HasComponent |
Variable |
InputVoltage |
0:Double |
0:AnalogUnitType |
O |
|
2:ParameterSet |
0:HasComponent |
Variable |
Temperature |
0:Double |
0:AnalogUnitType |
O |
The SerialNumber property is a unique production number assigned by the manufacturer of the device. This is often stamped on the outside of the device and may be used for traceability and warranty purposes. This property is derived from ComponentType defined in OPC 10000-100.
The Manufacturer property provides the name of the company that manufactured the device. This property is derived from ComponentType defined in OPC 10000-100.
The Model property provides the name of the product. This property is derived from ComponentType defined in OPC 10000-100.
The ProductCode property provides a unique combination of numbers and letters used to identify the product. It may be the order information displayed on type shields or in ERP systems. This property is derived from ComponentType defined in OPC 10000-100.
The AssetId property is a user writable alphanumeric character sequence uniquely identifying a component. The vendor, integrator or user of the device provides the ID. It contains typically an identifier in a branch, use case or user specific naming scheme. This could be for example a reference to an electric scheme. For electric schemes typically EN 81346-2 is used. A use case could be to build up a location-oriented view in a spare part management client software. It enables to identify parts with the same article number which is not possible if this entry is not used. This property is defined by ComponentType defined in OPC 10000-100.
The DeviceManual property allows specifying an address of the user manual for the controller. It may be a pathname in the file system or a URL (Web address). This property is defined by ComponentType defined in OPC 10000-100.
The ComponentName property provides a user writeable name provided by the vendor, integrator, or user of the device. The ComponentName may be a default name given by the vendor. This property is defined by ComponentType defined in OPC 10000-100.
The CurrentUser object provides information about the active vendor specific user level of the controller.
Components is a container for one or more instances of subtypes of ComponentType defined in OPC 10000-100. The listed components are installed in the motion device system, e.g. a processing-unit, a power-supply, an IO-board, or a drive, and have an electrical interface to the controller.
NOTE: This specification recommends using the 3:Components folder defined in OPC 40001-1 instead of the one defined in this specification above.
Table 97 – TypeDefinition of Components of ControllerType
|
Attribute |
Value |
||||
|
BrowseName |
Components |
||||
|
References |
Node Class |
BrowseName |
DataType |
TypeDefinition |
Modelling Rule |
|
0:HasComponent |
Object |
<ComponentIdentifier> |
|
2:ComponentType |
MandatoryPlaceholder |
The AuxiliaryComponentType and DriveType are the only subtypes of ComponentType for use in this container which are described in this specification. The intention is to integrate inside this container devices which are defined in other companion specifications using DI.
Software is a container for one or more instances of SoftwareType defined in OPC 10000-100. Each controller has at least one software installed.
TaskControls is a container for one or more instances of TaskControlType.
Description of ParameterSet of ControllerType:
- Variable TotalPowerOnTime: The TotalPowerOnTime variable provides the total accumulated time the controller was powered on.
- Variable StartUpTime: The StartUpTime variable provides the date and time of the last start-up of the controller.
- Variable UpsState: The UpsState variable provides the vendor specific status of an integrated uninterruptible power supply or accumulator system.
- Variable TotalEnergyConsumption: The TotalEnergyConsumption variable provides total accumulated energy consumed by the motion devices related with this controller instance.
- Variable CabinetFanSpeed: The CabinetFanSpeed variable provides the speed of the cabinet fan.
- Variable CPUFanSpeed: The CPUFanSpeed variable provides the speed of the CPU fan.
- Variable InputVoltage: The InputVoltage variable provides the input voltage of the controller which can be a configured value. To distinguish between an AC or DC supply the optional property Definition of the base type DataItemType shall be used.
- Variable Temperature: The Temperature variable provides the controller temperature given by a temperature sensor inside of the controller.
To transfer programs for task controls from or to the controller a file directory named Programs can be extended to instances of the ControllerType, which is the entry point for organizing programs. Within this file directory programs can be organized in underlaying file directories. This file directory is a virtual folder, so it does not need to be mapped to a folder naming and structure of the file system on the controller.
The HasSafetyStates reference provides the relationship of safety states to a controller. The InverseName is SafetyStatesOf.
The Controls reference provides the relationship of a motion device and controller. The InverseName is IsControlledBy.