The SystemOperationType is an AddIn Type to extend instances of ControllerType described in 7.18. The SystemOperationType provides a state machine to monitor and/or command the controller behaviour at the system level and is formally defined in Table 42.
Robot systems may have conditions that must be acknowledged before some operational commands can be executed.
The system has two possibilities to enable the Client to acknowledge conditions.
- By exposing at least one instance of AcknowledgeableConditionType inside the Server’s AddressSpace located within the Conditions folder as defined in the ConformanceUnit RobAckCondInstance.
- By handling such conditions using the OPC UA Eventing mechanisms as defined in the ConformanceUnit RobAckCondEventing.
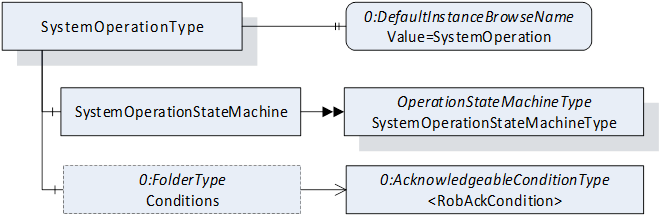
Figure 21 – SystemOperationType Overview