SafetyStateType describes the safety states of the motion devices and controllers. One motion device system is associated with one or more instances of the SafetyStateType.
The SafetyStateType was modelled directly in the MotionDeviceSystemType for the following reasons:
- The manufacturers of systems have different concepts where safety is functional located, e.g. the hardware and software implementation.
- The safety state typically applies to the entire robotic system. If multiple safety state instances are implemented in robotic systems, these can be represented by individual instances of the SafetyStateType and associated with the controller by reference.
The safety state is for informational purpose only and not intended for use with functional safety applications as defined in ISO 61508.
The SafetyStateType is formally defined in Table 28.
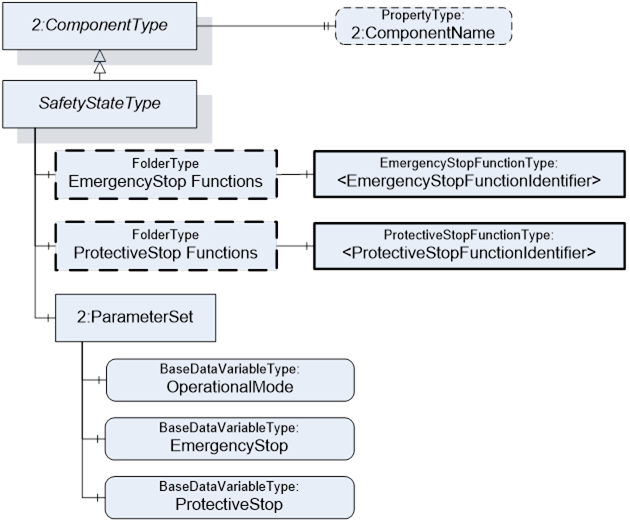
Figure 18 – Overview SafetyStateType