Part 1 of this companion specification describes an interface that provides access to asset management and condition monitoring data of motion device systems. Based on the provided data the following use cases are supported:
- Supervision: With the provided data by the companion specification the robot system can be supervised and monitored. Functional analysis of individual robot systems within the factory ground is possible. During production phase the companion specification provides data about the operational and safety states as well as process data.
- Condition monitoring: Condition monitoring is the process of determining the condition of machinery while in operation, in order to identify a significant change which is indicative of a developing fault. This is a major component of Predictive Maintenance where the maintenance is scheduled to shorten the downtime. The typical parameters needed for condition monitoring like motor temperature, load, on time are provided by the companion specification for robotics.
- Asset management: The companion specification for robotics provides detailed information of the main electrical and mechanical parts like part number, brand name, serial number etc. With these data an effective maintenance is possible because the technican knows in adcance which parts need to be changed and can be prepared.
Figure 8 shows the communication structure with OPC UA.
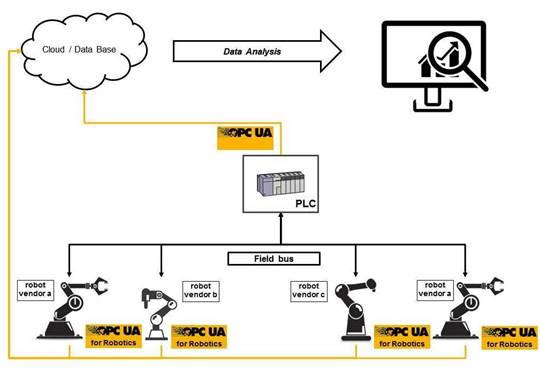
Figure 8 – Communication structure with OPC UA
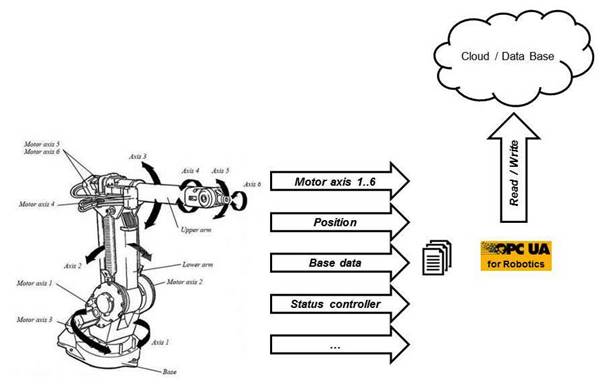
Figure 9 – OPC Robotics describes the semantic self-description