PROFINET is a widely used communication ecosystem for the OT level of industrial automation, and drives are a main component in automation systems for factory automation and process control. In the PROFINET ecosystem the PROFIdrive application profile is used for an interoperable drive interface on PROFINET and PROFIBUS. Because drives offer a lot of process and maintenance relevant information, they are predestined to offer their data via OPC UA to IT clients.
The PROFIdrive Drive Model is defined in [PI 3172 PDP] and defines the “Drive Object” (DO) as the main architectural element. The DO is the representative for the Drive Axis functionality further defined in [PDP] and is also used to represent additional auxiliary drive functionality like Infeed, Encoder and Control Units as an option. Therefore, being the main architectural object, the DO is used for the addressing of different axis within a Drive Device, by using the unique DO-ID or the assigned PROFINET module number. Figure 1 shows the PROFIdrive device model, where the P-Device represents the PROFINET Device hosting the Drive Objects as representatives for a Drive Axis functionality. The Drive Unit is used for internal Device structuring only and is not of further relevance for the functional information model.
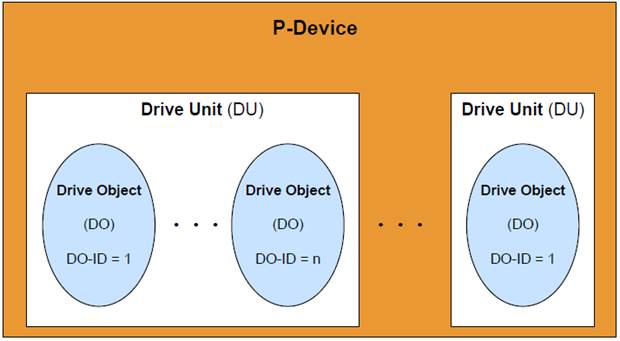
Figure 1 – General PROFIdrive drive model [PI 3172 PDP]
The Drive Object (DO) is the main component of the Drive functional model. Figure 2 shows the general architecture of the PROFIdrive Drive Object and its related PROFINET communication services. Main purpose of this companion specification is the functional model of a Drive Axis which is contained in the blue “Process Control Task” block of Figure 2. All information’s about the “Process Control Task” are available as parameters in the related “Parameter Data Base” and therefore accessible via PROFINET acyclic communication and the related “Parameter Manager”. As an option, the “Setpoint Values” and “Actual Values” used to control the “Process Control Task” by PROFINET cyclic data telegrams, are also part of the OPC UA Axis Information Model (see folder PNSignals in Figure 10).
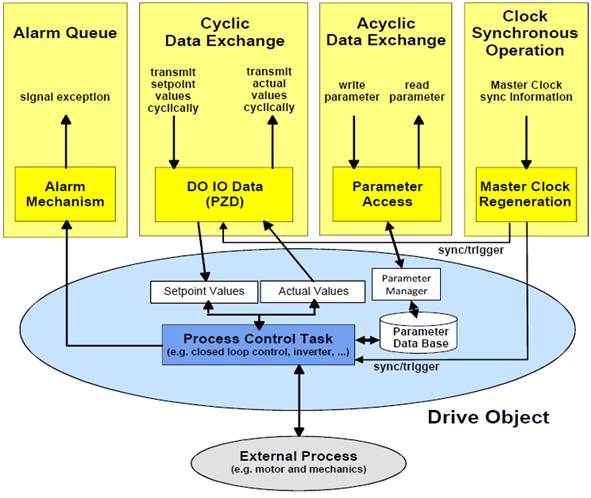
Figure 2 – General Drive Object architecture [PI 3172 PDP]
The main Drive Object types, which are the scope of standardization in the PROFIdrive profile, are of axis type. The Axis Drive Object types contain an electric, pneumatic or hydraulic actuator like a motor, together with the actor related control structures as shown in Figure 3. Mandatory functionality of all Axis Type Drive Objects is the Axis state machine for the control of the actor power stage and control functions. In addition, every Axis Type Drive Object offers a standardized fault buffer for the management and tracing of fault and warning situations of the axis. The amount and quality of control structures inside the Axis Drive Object is dependent on the overall application scenario, where the drive axis is embedded. For the classification of such standardized application scenarios, the PROFIdrive standard defines the PROFIdrive Application Classes.
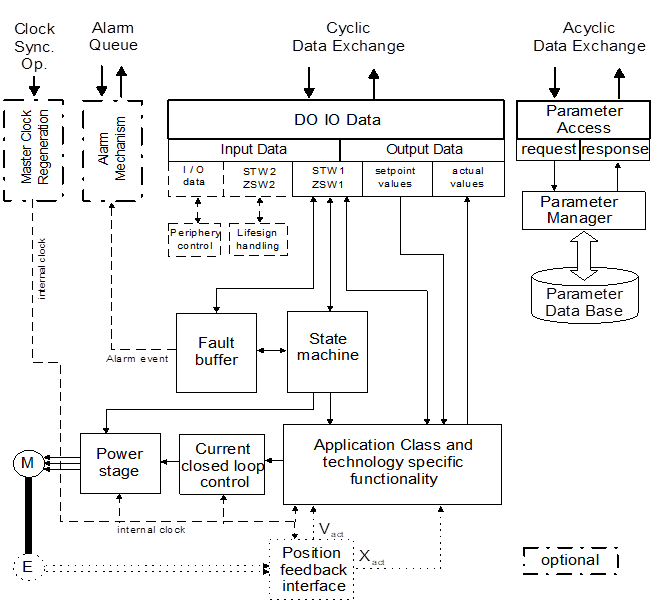
Figure 3 – Axis Type Drive Object Functionality [PI 3172 PDP]
Other logical objects which are defined in the context of a PROFIdrive Axis/DO:
- Objects for DO identification.
- Parameters for accessing information and settings of the individual function modules.
- Objects for drive control (for example, control words and status words).
- Objects for setpoint processing (for example, setpoint values and actual values).
- Objects for diagnostics and monitoring (for example, messages, alarms, faults).
- Objects for integrated sensor interface(s).
For the standardization of commonly used axis types PROFIdrive [PI 3172 PDP] defines the PROFIdrive Application Classes as defined in [PDP] and shown in Table 12. These Application Classes are the base for the definition of the DriveAxisTypes in this Companion Specification (see Figure 12).
Table 12 – PROFIdrive Application Classes
|
No. |
Application Class |
Interface |
Functions b |
|
1 |
Standard Drive |
n-setpoint, torque-setpoint, current-setpoint |
Cyclic IO Data interface a |
|
2 |
Standard drive with distributed technology controller (continuous process) |
Technological setpoint-actual values (command variables) |
Cyclic IO Data interface withDrive to Drive communication a |
|
3 |
Single Axis positioning drive, with local Motion Control |
pos-setpoint, run requests |
Cyclic IO Data interface a |
|
4 |
Motion Control with central interpolation and speed setpoint interface Optional: DSC (Dynamic Servo Control) |
n-setpoint x-actual additionally, for DSC: ∆x (xerr), KV (kPC) |
Cyclic IO Data interface, Clock Synchronous Operation, DSC |
|
5 |
Motion Control with central interpolation and position setpoint interface |
x-setpoint |
Cyclic IO Data interface, Clock Synchronous Operation |
|
6 |
Motion control for clocked processes, or distributed angular synchronism |
Command variables, motion instructions |
Cyclic IO Data interface, Clock Synchronous Operation, Drive to Drive communication |
|
a The cyclic interface may also be operated clock-synchronously if, for example, it is a question of synchrony of the actions in the case of several drives. bFor all Application Classes: acyclic interface for parameters, diagnostics, identification.
|
|||
Most PROFINET Drives still support the PROFIdrive profile. PROFIdrive offers an interoperable interface for the access to standard parameters and vendor specific parameters. This offers the possibility for an edge device to use the PROFIdrive profile as a standardized interface for the access to drive data via PROFINET and PROFIBUS.
Nevertheless, the OPC UA information model of this specification is not limited to PROFIdrive devices, because the mandatory parts of the information model are independent from PROFIdrive and quite common to all drives, independent on their communication interface. Therefore, all drives with PROFINET interface and their own OPC UA Server on board can use the Information Model out of this specification. Additional benefit for drives with PROFIdrive (using PROFINET or PROFIBUS) is, that brownfield Devices can be represented by an OPC UA Server in an edge or proxy Device (like a PLC cell Controller) by using a generic mapping based on the PROFIdrive application model and using the PROFIdrive parameter channel as generic transport interface.
Figure 4 shows different possibilities for Vertical Communication and IT integration of PROFINET Drives in a typical automation scenario. Drive A in Figure 4 has it’s own OPC UA server on board. The onboard OPC UA Server of Drive A contains the standardized information model out of this companion specification and may contain in addition vendor specific extensions to the standardized Information Model as well as additional independent vendor specific Information Models. Because of PROFINET being real switched Ethernet, the PROFINET network in the OT areas is used to access the local OPC UA Servers in the OT area independent from the PROFNET communication.
Drives B, C and the Drive Axis modules in the IO-Station are brownfield Devices or cost sensitive Devices, offering only a PROFINET PROFIdrive interface without having an own OPC UA Server. For Vertical Communication and IT integration of these Drive Devices, they have to be proxied by an edge Device or the cell Controller PLC acting as proxy for the Information Model of the PROFINET Devices under its control. The proxy Devices use PROFINET communication and the PROFIdrive parameter channel to access data on the PROFIdrive Drive Devices in the OT level. With PROFIdrive Devices, the proxies can use a generic mapping of standardized PROFIdrive data into the standardized Information Model defined in this companion specification. In addition, also for these PROFINET only Devices, it is possible to extend the standardized Information Model by vendor specific extensions by using the PROFINET GSD Generic companion specification OPC UA part 30144 (see [OPC 30144 GSD]). With the GSD Generic approach, it is possible to advertise all information on additions to the OPC UA Information Model and related PROFINET data communication by additions to the standard PROFINET GSD. Therefore, the GSD Generic approach is easily applicable for brownfield Devices and plain PROFINET Devices.
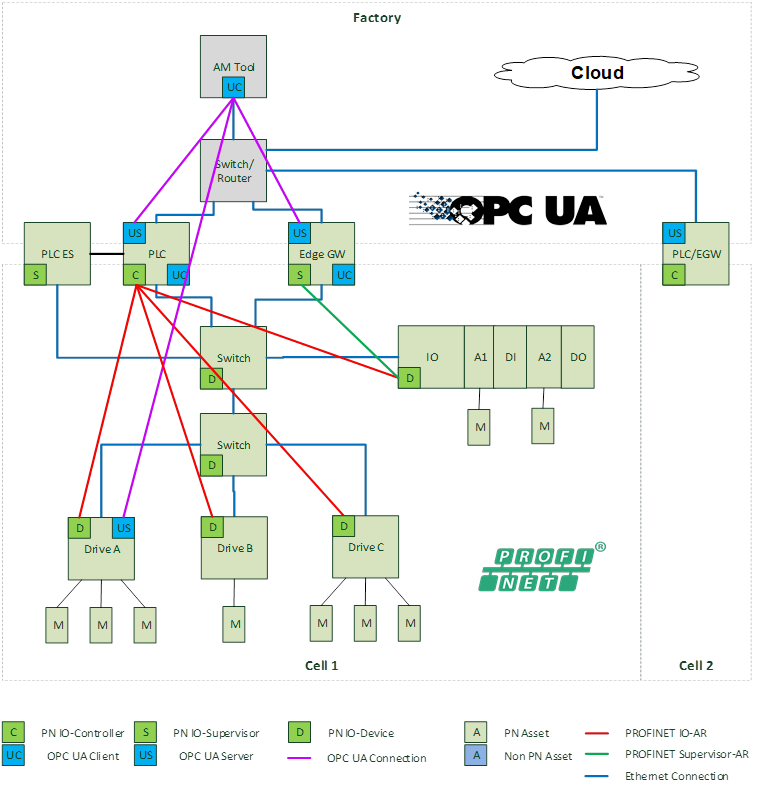
Figure 4 – Overall Communication Scenario for PROFINET Drives