Any machine can request a dozer machine to perform a dozing job in a specific area. The mobile machine capable of doing dozing jobs, provides a SetWorkJob-Method. When calling this method, the other vehicle needs to pass three arguments: The first argument is a list of cartesian coordinates defining a 3D Polygon as a working area. The second argument is list of cartesian coordinates defining a 3D Polygon as a dump area. The dump area can be null, if the dozer is free to decide where to dump the soil and rock. The third argument is a number defining the job type, the dozing machine should perform. These include, amongst others,
- Clean-Up operations
- Ripping operations
- Topsoil-Removal operations
- Blast-Clean-Up operations etc.
A graphical representation of the UC is depicted in Figure 2.
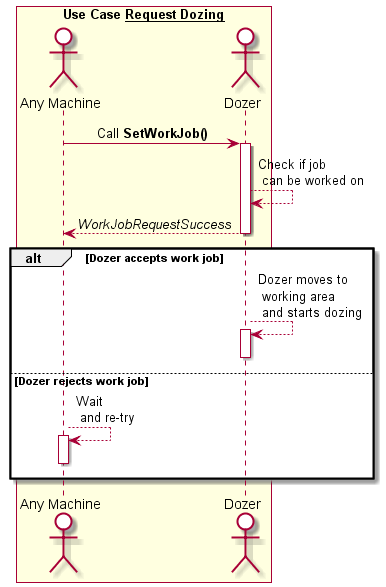
Figure 2 – Sequence diagram of the Request Dozing Use Case