The Use Case Positioning starts as soon as the hauling machine has been assigned a QueuePriority (see Chapter 4.2.2) of 1. The hauling machine shall then position itself in front of the rock crusher so that it can start unloading its truck-bed in the next process step.
First, the hauling machine waits for the rock crusher to trigger its StartPositioning-Method, indicating, that the hauling machine can now start the positioning procedure. If the hauling machine is not yet ready to start the procedure, the rock crusher may trigger the StartPositioning -Method again after a short period of time. In case the hauling machine is ready to start the positioning procedure, the hauling machine reads the area from the rock crusher, it is not permitted to enter while positioning itself. After having received this information, the hauling machine can compute its trajectories and start the positioning procedure.
In case the rock crusher has an internal error during the loading procedure, it can always inform the truck to stop its positioning using the StopPositioning-Method. In case the hauling machine has successfully positioned itself, it can inform the rock crusher by calling the PositioningComplete-Method. A sequence diagram of this UC interaction is shown in Figure 4.
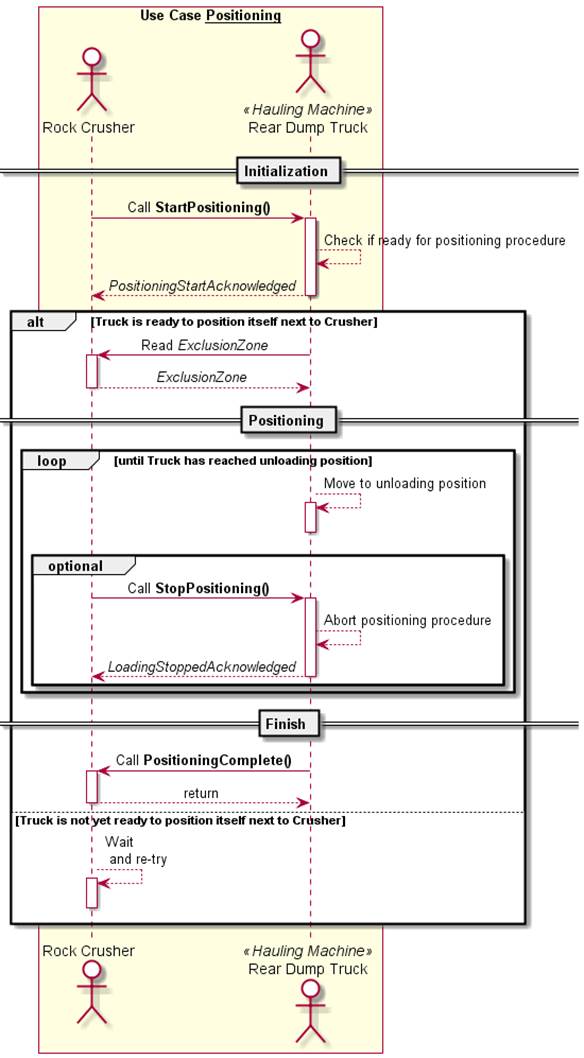
Figure 4 – Sequence diagram of the Positioning (Unloading) Use Case