The IPhysicalInterfaceType provides the minimal set of information that a physical interface object shall provide in a vision system. All objects that implement this interface shall be organized in the PhysicalInterfaces folder of the VisionSystemAssetType. It is formally defined in Table 30.
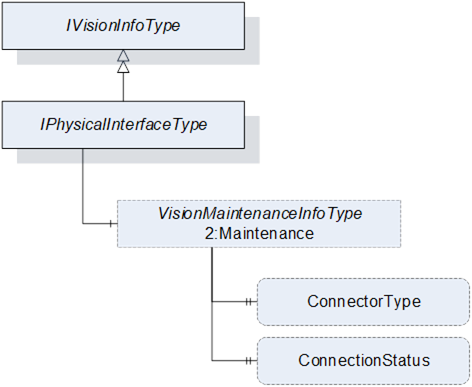
Figure 18 – IPhysicalInterfaceType
Table 30 – IPhysicalInterfaceType Definiton
|
Attribute |
Value |
||||
|
BrowseName |
IPhysicalInterfaceType |
||||
|
IsAbstract |
True |
||||
|
References |
Node Class |
BrowseName |
DataType |
TypeDefinition |
Other |
|
Subtype of the IVisionInfoType, inheriting the InstanceDeclarations of that Node. |
|||||
The components of the IPhysicalInterfaceType have additional subcomponents which are defined in Table 31.
Table 31 – IPhysicalInterfaceType Additional Subcomponents
|
Source Path |
Reference |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
Others |
|
2:Maintenance |
0:HasProperty |
Variable |
ConnectorType |
0:String |
0:PropertyType |
O |
|
Health |
0:HasProperty |
Variable |
ConnectionStatus |
0:Boolean |
0:PropertyType |
O |
The ConnectorType property denotes the type of connector for the physical interface (e.g., USB, Ethernet, etc.)
The ConnectionStatus property denotes if a signal is being received by the physical interface from the perspective of the machine vision system.