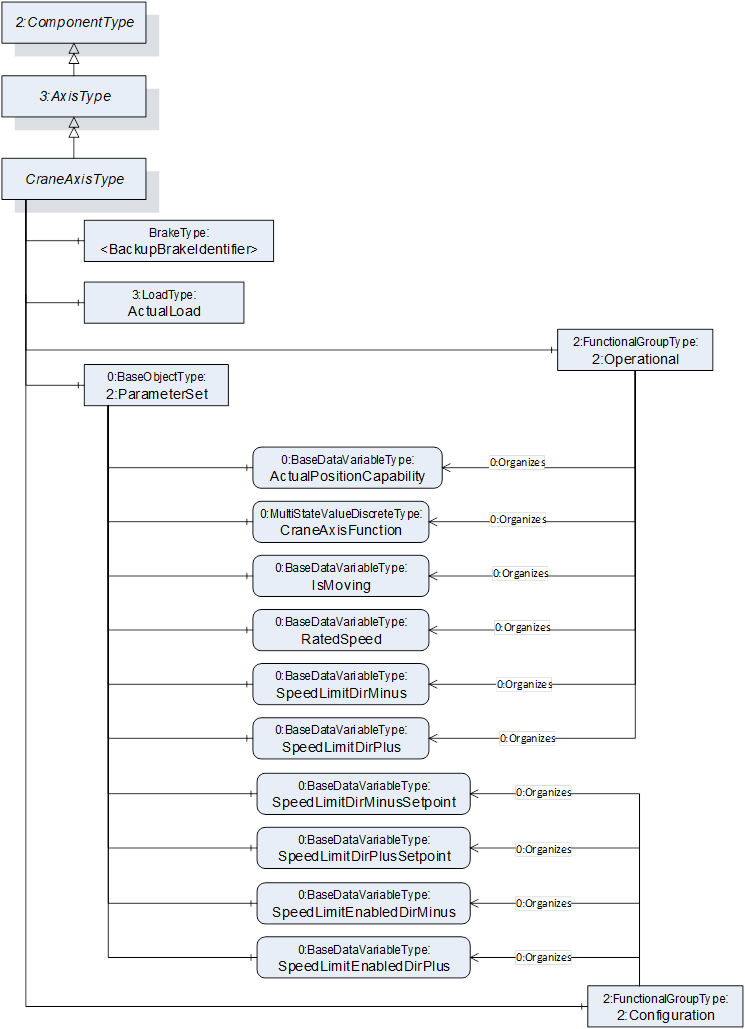
Figure 12 – Overview CraneAxisType
The CraneAxisType represents the crane axis and contains its various components. The type is a subtype of the OPC 40010-1 AxisType (OPC Robotics) and this is intended to provide compatibility with OPC 40010-1 aware clients. The CraneAxisType is formally defined in Table 16.
Table 16 – CraneAxisType Definiton
|
Attribute |
Value |
||||
|
BrowseName |
CraneAxisType |
||||
|
IsAbstract |
False |
||||
|
References |
Node Class |
BrowseName |
DataType |
TypeDefinition |
Other |
|
Subtype of the 3:AxisType defined in OPC 40010-1, i. e. inheriting the InstanceDeclarations of that Node. |
|||||
|
0:HasComponent |
Object |
ActualLoad |
|
3:LoadType |
O |
|
0:HasComponent |
Object |
<BackupBrakeIdentifier> |
|
BrakeType |
OP |
|
0:HasComponent |
Object |
2:Configuration |
|
2:FunctionalGroupType |
O |
|
0:HasComponent |
Object |
2:Operational |
|
2:FunctionalGroupType |
O |
|
Conformance Units |
|||||
|
Cranes Base Info CraneAxisType |
|||||
The ActualLoad object represents the load lifted by the crane. This object is mostly used in hoisting axis. The type (LoadType) is the one defined by OPC 40010-1 (OPC Robotics) and is used to represent the mass of the load, and optionally also inertia and/or the center of mass.
The <BackupBrakeIdentifier> object indicates that the axis may contain one or more backup brakes represented by BrakeType instances.
The Operational FunctionalGroup contains variables which represent the current state of the axis. These are read-only variables.
The Configuration FunctionalGroup contains variables which can be used to assess and/or affect the control of the axis, such as setting speed limits.
The components of the CraneAxisType have additional subcomponents which are defined in Table 17.
Table 17 – CraneAxisType Additional Subcomponents
|
BrowsePath |
References |
NodeClass |
BrowseName |
DataType |
TypeDefinition |
Others |
|
2:ParameterSet |
0:HasComponent |
Variable |
ActualPositionCapability |
0:Boolean |
0:BaseDataVariableType |
M, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
CraneAxisFunction |
0:UInt16[] |
0:MultiStateValueDiscreteType |
O, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
IsMoving |
0:Boolean |
0:BaseDataVariableType |
O, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
RatedSpeed |
0:Double |
0:AnalogUnitType |
O, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
SpeedLimitDirMinus |
0:Double |
0:AnalogUnitType |
O, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
SpeedLimitDirMinusSetpoint |
0:Double |
0:AnalogUnitType |
O, RW |
|
2:ParameterSet |
0:HasComponent |
Variable |
SpeedLimitDirPlus |
0:Double |
0:AnalogUnitType |
O, RO |
|
2:ParameterSet |
0:HasComponent |
Variable |
SpeedLimitDirPlusSetpoint |
0:Double |
0:AnalogUnitType |
O, RW |
|
2:ParameterSet |
0:HasComponent |
Variable |
SpeedLimitEnabledDirMinus |
0:Boolean |
0:BaseDataVariableType |
O, RW |
|
2:ParameterSet |
0:HasComponent |
Variable |
SpeedLimitEnabledDirPlus |
0:Boolean |
0:BaseDataVariableType |
O, RW |
|
2:Operational |
0:Organizes |
Variable |
ActualPositionCapability |
0:Boolean |
0:BaseDataVariableType |
M, RO |
|
2:Operational |
0:Organizes |
Variable |
CraneAxisFunction |
0:UInt16[] |
0:MultiStateValueDiscreteType |
O, RO |
|
2:Operational |
0:Organizes |
Variable |
IsMoving |
0:Boolean |
0:BaseDataVariableType |
O, RO |
|
2:Operational |
0:Organizes |
Variable |
RatedSpeed |
0:Double |
0:AnalogUnitType |
O, RO |
|
2:Operational |
0:Organizes |
Variable |
SpeedLimitDirMinus |
0:Double |
0:AnalogUnitType |
O, RO |
|
2:Operational |
0:Organizes |
Variable |
SpeedLimitDirPlus |
0:Double |
0:AnalogUnitType |
O, RO |
|
2:Configuration |
0:Organizes |
Variable |
SpeedLimitDirMinusSetpoint |
0:Double |
0:AnalogUnitType |
O, RW |
|
2:Configuration |
0:Organizes |
Variable |
SpeedLimitDirPlusSetpoint |
0:Double |
0:AnalogUnitType |
O, RW |
|
2:Configuration |
0:Organizes |
Variable |
SpeedLimitEnabledDirMinus |
0:Boolean |
0:BaseDataVariableType |
O, RW |
|
2:Configuration |
0:Organizes |
Variable |
SpeedLimitEnabledDirPlus |
0:Boolean |
0:BaseDataVariableType |
O, RW |
The ActualPositionCapability describes if the crane is able to give the position of the axis. The crane must be equipped with the necessary devices to provide this type of information. If the variable value is True, the axis position can be obtained from the variable ActualPosition inherited from the OPC 40010-1 (OPC Robotics).
The CraneAxisFunction describes the axis operating mode. The possible values are described in Table 18.
The IsMoving indicates if the axis is moving (TRUE) or not (FALSE).
The RatedSpeed indicates the rated (nominal) speed of the axis.
The SpeedLimitDirMinus indicates the speed limitation value active on the control system, in direction where position value decreases, in percentage of rated speed, range [0%..100%].
The SpeedLimitDirMinusSetpoint indicates the speed limitation request written from client, in direction where position value decreases, in percentage of rated speed, range [0%..100%].
The SpeedLimitEnabledDirMinus indicates a speed limitation request active, written from client, in direction where position value decreases. True if a client requests the speed to be limited in this direction, false if speed doesn't need to be limited.
The SpeedLimitDirPlus indicates the speed limitation value active on the control system, in direction where position value increases, in percentage of rated speed, range [0%..100%].
The SpeedLimitDirPlusSetpoint indicates the speed limitation request written from client, in direction where position value increases, in percentage of rated speed, range [0%..100%].
The SpeedLimitEnabledDirPlus indicates a speed limitation request active, written from client, in direction where position value increases. True if a client requests the speed to be limited in this direction, false if speed doesn't need to be limited.