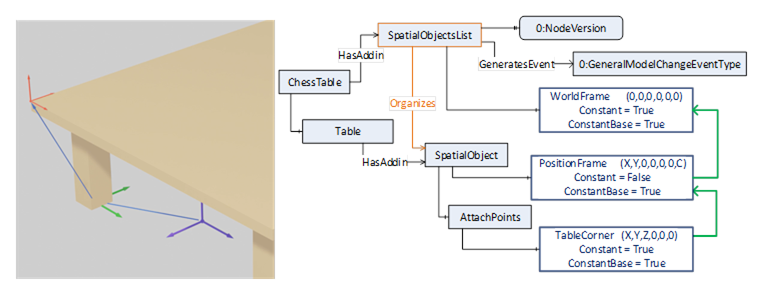
An object is extended by the SpatialObject-Addin which provides (see Figure 13):
- Its position regarding a defined coordinate system (WorldFrame):
The green coordinate system at the left foot of the table is the location of the table. It is defined by the PositionFrame of its SpatialObject, which describes the shift related to the WorldFrame.
It is assumed that the table is movable, so the Property Constant this PositionFrame is False. This table is moveable but will always be related to this WorldFrame, so ConstantBase of this PositionFrame is True.
- Attach points of the object where other objects can be geometrically related:
The red coordinate system at the table corner can be defined as an attach-point of the table.
The blue arrow from the foot to the corner of the table shows the displacement (via a frame definition) from the table position to the table corner by the frame TableCorner. The red coordinate system defines the coordinate system of this attach point.
The table is rigid, so table corner does not change its position and so Constant and ConstantBase of this attach-point TableCorner are both True.